Содержание
Компетентные органы по средствам навигационного оборудования обычно создаются для обеспечения режима безопасной навигации, способствующего развитию торговли и экономики. Поэтому первоочередная работа таких органов направлена на удовлетворение нужд коммерческих торговых судов. В некоторых районах компетентные органы могут также оказывать услуги паромам, рыболовным и прогулочным судам, участвовать в других видах морской деятельности.
В данной главе освещаются методы навигации и требования точности с точки зрения коммерческих торговых судов.
Методы навигации
Резолюция А.915(22) ММО дает следующее определение термину навигация – «Процесс планирования, учета и контроля движения корабля из одного места в другое».
Основные методы морской навигации можно коротко описать следующим образом:
- Навигации по наземным ориентирам: навигация с помощью визуальных, радиолокационных наблюдений и (при необходимости) глубинного зондирования различимых, выдающихся элементов рельефа, объектов и знаков для определения положения.
- Навигация по небесным ориентирам или по звездам: навигация с помощью наблюдений небесных тел (например, солнца, луны, планет и звезд) для определения положения.
- Счисление пути: навигация с помощью подсчета скорости, затраченного времени и направления движения судна из известной точки. Термин первоначально был связан с заданным курсом и скоростью движения в воде, однако данное обозначение может также применяться к положениям, установленным с помощью курса и предполагаемой скорости движения по земле, таким образом, лишь приблизительно учитываются такие мешающие элементы, как течение и ветер. Положение, установленное с использованием данного метода, обычно называется расчетным местоположением.
- Радионавигация: навигация с помощью радиосигналов для определения положения или линии положения (например, eLORAN, GPS, DGPS).
По мере возможности рекомендуется определять местоположение судна с использованием нескольких методов навигации.
Стандарты точности навигации
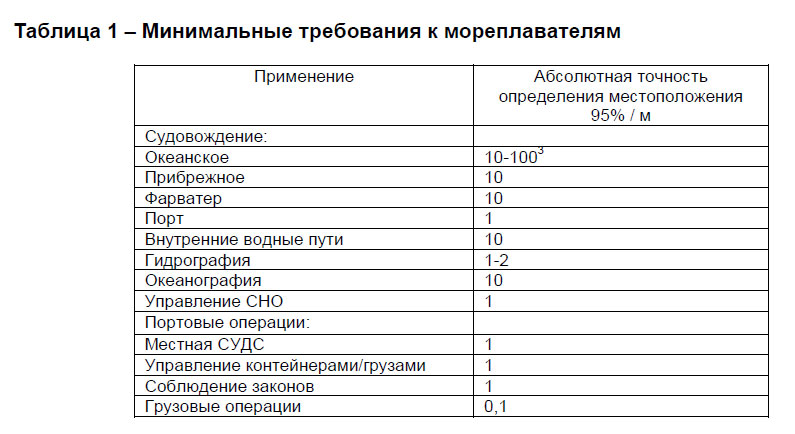
Резолюция А.915(22) ММО, принятая в январе 2002, устанавливает стандарты точности для морской навигации.
В Таблице 1 представлены соответствующие стандарты, утвержденные в Приложениях 2 и 3 Резолюции А.915(22) ММО.
Виды навигации
Как правило, различают три вида навигации: океанская навигация, прибрежная навигация и навигация в фарватере. В некоторых документах представлены другие виды навигации, например, заход в порт, навигация в порту и по внутренним водным путям.
Заход в порт - это один из аспектов навигации в фарватере, в настоящем руководстве он будет описан отдельно.
На данном этапе навигации судно, как правило, находится (могут применяться один или более признаков):
- за пределами континентального шельфа (200 метров в глубину) и более чем на 50 нм от берега;
- в водах, где определение местоположение судна визуально относительно земли, нанесенных на карту стационарных морских сооружений или стационарных или средств навигационного оборудования невозможно;
- достаточно далеко от суши и судоходных путей, где опасности мелководья и столкновения сравнительно невелики.
Несмотря на то, что ММО утвердила более строгие требования к точности (см. Таблицу 1), минимальными навигационными требованиями на этапе океанской навигации считается расчетная точность от 2 до 4 нм, при заданном фиксированном интервале 15 минут или менее (максимальный фиксированный интервал 2 часа). Требуемая точность на этапе океанской навигации основана на предоставлении кораблю возможности правильно спланировать подход к суше или фарватеру.
Аспекты экономической эффективности судоходства (например, транзитное время и расход топлива) улучшает наличие системы постоянного и точного определения местоположения судна, что позволяет ему точно следовать кратчайшим безопасным путем.
На данном этапе навигации судно, как правило, находится:
- в пределах 50 нм от берега или границы континентального шельфа (200 метров в глубину);
- в водах, прилегающих к суше или группе островов, где трансокеанские маршруты сходятся в одной точке по направлению к районам назначения и где движение судов между портами проходит по участкам, параллельным побережью.
Корабль может встретить:
- системы судовых сообщений (ССС) и прибрежные службы по управлению движением судов (СУДС);
- разработку морских месторождений и научно-исследовательскую деятельность на континентальном шельфе;
- рыболовные или прогулочные судна.
Прибрежная навигация имеет место тогда, когда расстояние от берега позволяет движение судна с помощью визуальных наблюдений, радиолокатора и, при необходимости, глубиномера (эхолота). Как и на этапе океанской навигации, расстояние от земли может меняться в зависимости от других судов и местных географических характеристик.
Несмотря на то, что ММО утвердила более строгие требования к точности (см. Таблицу 1), международные исследования показали, что минимальным навигационным требованием для коммерческих торговых судов, находящихся в зоне прибрежной навигации, является использование системы навигации, обеспечивающей определение местоположения судна с точностью до 0,25 морских миль при заданном фиксированном интервале от 2 до максимум 15 минут.
Более специализированные действия на море в районе прибрежной навигации могут потребовать использование навигационных систем с большей точностью воспроизведения, постоянно или от случая к случаю. Такие действия могут включать морские научные, гидрографические исследования, промысловое рыболовство, разведку нефти, газа и полезных ископаемых, а также поисково-спасательные работы (ПСС).
Практически невозможно, принимая во внимание комплектование личного состава на многих судах, наносить отметки о местоположении судна на карту через заданные интервалы в 2 минуты традиционным способом. При интеграции с технологиями Электронной картографической системы (ЭКС) или Электронной картографической навигационной информационной системы (ЭКНИС) системы GPS и дифференциальной DGPS (в будущем в некоторых районах будет использоваться улучшенная версия системы Loran (eLORAN)) позволяют достигать точности местоположения выше требований, установленных ММО на этапе прибрежной навигации, а также фиксировать курс судов.
ЗАХОД В ПОРТ
Данный этап представляет движение судна из зоны прибрежной навигации к порту. На данном этапе:
- судно движется из относительно свободных вод района прибрежной навигации в более ограниченные воды с более интенсивным движением около и/или на входе в бухту, реку или порт; и
- штурман сталкивается с требованием более частого определения местоположения судна и управляет судном, чтобы избежать столкновения с другим транспортом и не сесть на мель.
Как правило, судно находится в пределах:
- зоны покрытия средств навигационного оборудования различной сложности (включая маяки, радиолокационные ответчики, створные и секторные огни);
- районы лоцманской проводки; и
- границы ССС и СУДС.
Вопросы безопасности навигации на этапе захода в порт налагают более жесткие требования к точности определения местоположения, фиксированию курса и другой навигационной информации, поступающей в реальном времени, чем требуется на этапе прибрежной навигации.
При интеграции с технологиями ЭКС и ЭКНИС системы GPS и дифференциальной DGPS (в некоторых районах улучшенная версия системы Loran (eLORAN)) позволяют выполнять требования высокой точности определения местоположения при заходе в порт и фиксировать курс чаще, чем в 10-секундные интервалы.
ФАРВАТЕР
Подобно этапу захода в порт, в непосредственной близости к опасностям и ограничителям свободы передвижения, этап движения в фарватере может возникнуть во время прохождения этапа прибрежной навигации, например, в различных течениях по всему миру.
Лоцман или капитан большого корабля в ограниченных водах должны направлять его движение с большой точностью, чтобы избежать посадки на мель на мелководье, столкновения с подводными опасностями или другими судами в узком канале. Если большое судно оказалось в новой навигационной ситуации без возможности изменить курс или остановиться, возможно придется вести корабль внутри установленных ограничений с точностью до нескольких метров для того, чтобы избежать аварии.
Требования к безопасности судоходства в ограниченных водах требуют от навигационных систем обеспечения:
- почти постоянной точной проверки положения судна;
- информацию, отображающую любые отклонения судна от намеченного курса;
- мгновенное указание направления, в котором должен двигаться корабль, для сохранения намеченного курса.
Указанные требования точности измерений легко выполняются с помощью визуальных или радиолокационных СНО, однако также как на этапе захода в порт требования точности могут быть выполнены с помощью одновременного использования систем DGPS (в некоторых районах улучшенная версия системы Loran (eLORAN)) и технологий ЭКС или ЭКНИС.
Ошибки измерений и точность
Согласно рекомендуемым нормам навигации и расположения средств навигационного оборудования ошибки или неточности при измерении параметров или определении местоположения судна должны быть представлены вместе с полученными результатами измерений.
ОШИБКИ ИЗМЕРЕНИЙ
Погрешность измерений определяется как разница между истинным и измеренным значениями. Как правило, выделяют три вида погрешностей:
- Систематические погрешности: (постоянные ошибки или ошибки отклонения) это ошибки, которые появляются снова и которые относятся к собственной погрешности оборудования или являются результатом использования неправильно калиброванного оборудования. Такие ошибки можно в определенной степени предвидеть и скорректировать.
- Случайные погрешности: приводят к тому, что показания приборов выбирают случайные значения, выше или ниже определенного среднего значения. Они могут возникать по вине наблюдателя/оператора или оборудования и выявляются путем проведения повторных измерений. Такие погрешности невозможно предсказать и полностью скорректировать.
- Погрешности и ошибки: ошибки этого вида можно сократить, проведя соответствующее обучение персонала и соблюдая установленные процедуры.
ТОЧНОСТЬ
При проведении ряда измерений термин точность обозначает степень соответствия между измеренным в данный момент параметром и истинным параметром в тот же момент.
К параметрам относятся: местоположение, координаты, скорость, время, угол и т.п.
Для целей навигации выделяют четыре типа точности:
- Абсолютная точность (точность геодезических или географических измерений): точность расположения по географическим или геодезическим координатам Земли.
- Прогнозируемая точность: точность определения местоположения с учетом прогнозируемой погрешности. Она напрямую зависит от изученности источников ошибки.
- Относительная точность: точность, с которой пользователь может определить местоположение относительно положения другого пользователя той же самой навигационной системы в то же самое время.
- Точность многократного воспроизведения: точность, с которой пользователь может вернуться к положению, координаты которого были измерены в предыдущий период, с помощью независимых измерений той же самой навигационной системы.
Для общей навигации наиболее важными являются абсолютная и прогнозируемая точность.
Точность многократного воспроизведения представляет больший интерес для рыбаков, морской нефтегазовой промышленности, кораблей, совершающих регулярные поездки в зону ограниченных вод, и маячных служб при установке плавучих средств навигационного оборудования.
Точность определения местоположения
Для определения положения на море необходимо, как минимум, две линии положения (ЛП). Так как для каждой ЛП есть свои погрешности, установленное местоположение имеет двумерную погрешность. Есть несколько способов анализа границы ошибок, однако радиальная погрешность определения местоположения относительно истинного положения, взятая на уровне вероятности 95%, считается наиболее предпочтительным методом.
Измерения для определения местоположения на море
В Таблице 2 представлена стандартная погрешность (вероятность 95%) измерений, полученных с помощью стандартных навигационных инструментов или методов.

Гидрографические расчеты
Согласно определению ММО навигационная карта или навигационное издание - это карта или книга специального назначения или специально созданная база данных, на основе которой составлена такая карта или книга, официально опубликованная с разрешения или по распоряжению правительства, уполномоченной гидрографической службы или другого соответствующего государственного учреждения и предназначенная для удовлетворения потребностей морской навигации. Навигационные карты представляют графическое изображение ровной поверхности участка моря, созданное для включения известных опасностей и средств навигационного оборудования.
Главной международной организацией по вопросам навигационных карт является Международная гидрографическая организация (МГО). МГО - это межправительственная консультативная и техническая организация, созданная в 1921 г. для поддержки безопасности судоходства и защиты морской окружающей среды. МГО несет ответственность за установление международных стандартов качества для гидрографической съемки и создания карт.
Электронные карты предоставляет значительные преимущества в отношении безопасности навигации и улучшения эффективности работы. Электронная карта - это навигационная система в реальном времени, объединяющая различную информацию, которая отображается на дисплее и расшифровывается моряком.
Это устройство автоматизированного принятия решений, способное постоянно определять местоположение судна относительно земли, отмеченных на карте объектов, средств навигационного оборудования и невидимых опасностей. Есть два основных типа систем, использующих электронные карты. Системы, которые соответствуют требованиям Международной морской организации (ММО), известны как Электронные картографические навигационные информационные системы (ЭКНИС), и другие виды электронных карт, обычно называемые Электронными картографическими системами (ЭКС).
Целью МГО является выполнение:
- координация деятельности национальных гидрографических служб;
- достижение максимально возможного единства навигационных карт и документов;
- утверждение надежных и эффективных методов выполнения гидрографической съемки; и
- развитие науки гидрографии и методов, используемых в описательной океанографии.

ТОЧКА ОТСЧЕТА
Простыми словами, точка отсчета - это предполагаемая или заданная нулевая точка, на основе которой выполняются все измерения.
Более сложным примером точки отсчета является начало системы координат, используемое в математической модели поверхности земли. Множество различных точек отсчета были разработаны в течение длительного времени для определения размера и формы земли, начала и положения системы координат для навигационных карт и картографических приложений. Они изменялись от представления сферической формы земли, до геоида и эллиптических моделей, а также двумерной проекции, используемой для навигационных карт и схем.
Модель геоида представляет поверхность земли как поверхность равного потенциала, приблизительно совпадающую с уровнем моря при отсутствии приливов, течений, изменений плотности воды и атмосферных явлений. При дальнейшем приближении используется эллипсоид, гладкая математическая поверхность, в качестве наиболее соответствующей геоиду модели. Первые эллипсоидные модели были разработаны для использования в картографии и местных регионов и стран. Однако они не всегда являются удовлетворительным решением в других частях мира. Некоторые навигационные карты до сих пор имеют обозначения, относящиеся к местному нулю глубин, например, Эллипсоид Хейфорда или Международный нулевой уровень Потсдама, Парижа или Лиссабона.
Нуль глубин
Нуль глубин определяется как исходный или нулевой уровень, с которым соотносятся все нанесенные на карте глубины и высоты осушки. Он относится к локализованному участку и является уровнем, ниже которого обычно не опускается волна. Его часто называют наинизшим уровнем прилива (а в некоторых случаях индийской сизигийной малой водой).
Нуль высот
Это общий термин для установления поверхностей, используемых для определения уровней и высот. Воспользуемся навигационными картами в качестве примера:
- глубина вод определяется как расстояние от нуля глубин до морского дна;
- уровни суши и антропогенных объектов даны относительно средней полной воды сизигийного прилива (где они преимущественно являются полусуточным приливом) или среднего уровня полных вод (где они преимущественно являются суточным приливом);
- габаритная высота для мостов обычно дана относительно наивысшего астрономического прилива.
Все эти уровни представлены на Рисунке 4. Обозначения этих и других уровней представлены в Таблице3.


Аспекты систем координат навигационных карт
До появления спутниковой навигации навигационные карты, как правило, создавались для местных и государственных систем координат. Широко используемая в настоящее время система позиционирования GPS использует точку отсчета от центра, установленную Всемирной геодезической системой 1984 г. (ВГС-84), которая считается лучшим решением для представления всей поверхности земли.
ВСГ-84 является геодезической системой, связанной с передачей информации с дифференциальной коррекцией с помощью морских станций DGPS с помощью сигналов формата МСЭ-Р M.823/1.
Техническая резолюция МГО B1.1 рекомендует всем странам при создании национальных навигационных карт использовать в качестве основы геодезическую систему ВГС-84.
Для многих стран эта простая задача требует проведение значительной работы и может занять несколько лет. Соответственно, многие навигационные карты продолжают использовать данные, отличные от данных системы ВГС-84, поэтому между положением, установленным с помощью системы GPS, и положением на навигационной карте возможны расхождения в несколько сотен метров. В течение этого переходного периода, штурманы и другие лица, использующие навигационные карты, должны:
- знать, какая система координат применяется в используемой навигационной карте;
- включать данные о применяемой системе координат при передаче информации об измеренном положении;
- определять, может или не может установленное спутником положение быть нанесено на навигационную карту. В некоторых случаях карты включают информацию для подгонки установленного спутником положения к системе координат навигационной карты;
- знать, что некоторые GPS-приемники имеют функцию автоматического преобразования (и отображения) положения судна по ВНС-84 в другие геодезические системы координат.
Пользователь должен знать, какие настройки использованы в приемнике.
Примеры стиля обозначений на некоторых навигационных картах представлены на Рисунке 5.

На национальном уровне очень важно чтобы органы, ответственные за средства навигационного оборудования, и гидрографические службы работали вместе, чтобы обеспечить наличие системы или комплекта средств навигационного оборудования, и применений навигационных карт, удобных для безопасной навигации мореплавателей.
Требования к точности общей навигации могут относиться к масштабу навигационной карты, необходимого для каждого участка прохода, что в свою очередь определяется местными условиями и типом судна.
В Таблице 4 представлены масштабы карт с соответствующими требованиями к точности, рекомендованными МГО, и аналогичным размером точки в 0,5 мм на навигационной карте.

МЕСТОПОЛОЖЕНИЕ БУЕВ НА КАРТЕ
Нельзя с уверенностью утверждать, что плавучие СНО всегда сохраняют точное положение. Поэтому к буям нужно относиться с осторожностью, а не рассматривать их как абсолютно надежные навигационные знаки, особенно в открытых положениях. Судно должно всегда, когда это возможно, двигаться по координатам стационарных объектов или углов между ними, а не по буям.
Литература
Navguide: Руководство по навигационному оборудованию [2012]