В системах, где нужно точное измерение угловой координаты вместо сельсинов используют вращающие трансформаторы.
Вращающийся трансформатор (резольвер) – электрическая микромашина переменного тока, предназначенная для преобразования угла поворота в электрическое напряжение, амплитуда которого пропорциональна или является функцией (чаще всего, синус или косинус) угла или самому углу.
В зависимости от схемы включения вращающиеся трансформаторы могут использоваться в качестве:
- датчиков углового положения, реализующих синусную и/или косинусную зависимость от угла поворота ротора, а также, в ограниченных пределах, линейную зависимость;
- устройств масштабирования (согласования) напряжений;
- системах передачи угла высокой точности;
- фазовращателей;
- построителей, позволяющих производить преобразования систем координат (вращение и преобразование декартовой системы в полярную);
- аналого-цифровых преобразователях;
- датчиков обратной связи в следящих системах.
Вращающиеся трансформаторы являются двухполюсными (в основном) или многополюсными электрическими машинами. По конструкции аналогичны асинхронным электродвигателям с фазным ротором. Статор и ротор набираются из листов электротехнической стали. В пазы статора и ротора укладываются по две взаимно перпендикулярные обмотки.
Наибольшее применение получили двухполюсные вращающиеся трансформаторы с двумя парами одинаковых взаимно перпендикулярных обмоток: обмотки w1 и wK (C1–С2 и СЗ–С4) расположены на статоре; обмотки w2 и w3 (Р1 – Р2 и РЗ – Р4) – на роторе (рисунок 2.29).

Обмотка возбуждения (C1-С2) включается в сеть переменного тока, компенсационная обмотка С3-С4 замыкается накоротко или на резистор. Обмотки на роторе называют вторичными: синусная P1 - Р2 и косинусная Р3 - Р4. Электрический контакт с обмотками ротора осуществляется либо с помощью контактных колец и щеток (аналогично контактным сельсинам), либо посредством спиральных пружин. В последнем случае угол поворота ротора вращающегося трансформатора ограничивается максимальным углом закручивания спиральных пружин.
Принцип работы вращающихся трансформаторов основан на взаимной индуктивности между обмотками статора и ротора, которая изменяется в определенной функциональной зависимости от угла поворота ротора.
Если вращающийся трансформатор используется в качестве измерительного элемента, то поворот ротора осуществляется посредством редукторного механизма высокой точности, который либо встраивается в корпус вращающегося трансформатора, либо монтируется отдельно от вращающегося трансформатора и механически соединяется с его валом. Если вращающийся трансформатор предназначен для работы в режиме поворота ротора в пределах определенного угла, то в качестве обмоток возбуждения и компенсационной используются обмотки статора, а в качестве вторичных – обмотки ротора.
Если вращающийся трансформатор работает в режиме непрерывного вращения ротора, то обычно применяют «обратное» использование обмоток: обмотки ротора используют в качестве обмоток возбуждения и компенсационной, а обмотки статора – в качестве вторичных. Если компенсационная обмотка замыкается накоротко, то при «обратном» использовании обмоток на роторе применяют лишь два контактных кольца, что упрощает конструкцию, повышает надежность и точность вращающегося трансформатора.
Вращающиеся трансформаторы подразделяются на контактные и бесконтактные, с ограниченным и неограниченным углом поворота ротора.
В зависимости от схемы включения обмоток возможны следующие режимы работы:
- синус-косинусные (выходное напряжение одной из обмоток трансформатора пропорционально синусу угла поворота ротора, а другой – косинусу);
- линейные (выходное напряжение пропорционально углу поворота);
- масштабные (выходное напряжение пропорционально входному с коэффициентом пропорциональности (масштабом), определяемым углом поворота ротора);
- построитель (такие поворотные трансформаторы применяются в автоматических устройствах для решения геометрических или математических задач, в качестве преобразователя пространственных координат);
- датчики и приёмники систем передачи угла (выполняют функции, аналогичные трансформаторным сельсинам);
- первичные преобразователи для индукционных фазовращателей.
Работа вращающихся трансформаторов в системах синхронной связи аналогична работе сельсинов. Вращающиеся трансформаторы обеспечивают более высокую точность, но для их работы необходимы дополнительные усилительные устройства с большим коэффициентом усиления, так как их выходная мощность меньше, чем у сельсинов.
Важнейший показатель работы системы дистанционной передачи угла – точность отработки угла, заданного на датчике. Точность системы будет тем выше, чем меньше погрешность примененных в ней вращающихся трансформаторов. Показателем точности системы дистанционной передачи угла является погрешность следования, представляющая собой разность угловых положений системы. В зависимости от погрешности следования трансформаторные системы с вращающимися трансформаторами делят на 11 классов точности в диапазоне от +0,1 до +30 мин.
В отличие от трансформаторной системы на сельсинах система на вращающемся трансформаторе обеспечивает более высокую точность, что объясняется большей точностью вращающихся трансформаторов по сравнению с сельсинами. Однако мощность на выходе ВТ-приемника меньше мощности на выходе сельсина-приемника, поэтому для трансформаторных систем на вращающемся трансформаторе требуются усилители мощности с более высоким коэффициентом усиления.
Промышленность изготовляет вращающиеся трансформаторы, предназначенные для включения в сеть переменного тока обычно частотой 400 и 2 тыс. Гц.
Синус–косинусные вращающиеся трансформаторы в синусном режиме
В этом режиме синус-косинусные вращающиеся трансформаторы (СКВТ) используется лишь одна (синусная) обмотка ротора w2 (рисунок 2.30 а). При включении в сеть обмотки возбуждения w1 в ней появляется ток I1, который наводит магнитный поток Ф1.
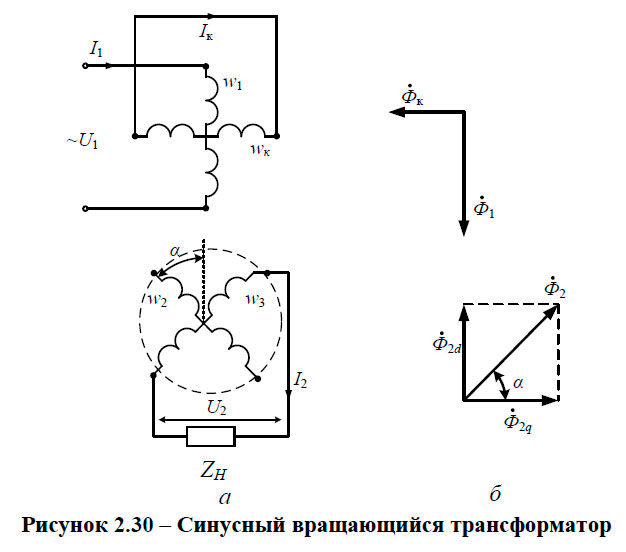
Сцепляясь с вторичной обмоткой, этот поток индуктирует в ней ЭДС E2, величина которой зависит от положения вторичной обмотки относительно обмотки возбуждения, т. е. от угла поворота ротора α. При холостом ходе на выходе ВТ появляется напряжение
где U2M – наибольшее значение напряжения, соответствующее α=90°.
При подключении нагрузки ZH к зажимам вторичной обмотки P1 – Р2 в ее цепи появляется ток I2. Созданный этим током магнитный поток Ф2 можно разложить на две составляющие: составляющую Ф2d=Ф2sinα, направленную по продольной оси ВТ встречно магнитному потоку возбуждения, и составляющую Ф2q=Ф2sinα, направленную по поперечной оси ВТ, т. е. перпендикулярно обмотке возбуждения, и вызывающую искажение магнитного поля ВТ (рисунок 2.30 б).
Размагничивающее влияние составляющей Ф2d уравновешивается увеличением тока в обмотке возбуждения.
ЭДС самоиндукции, наводимая составляющей Ф2q в обмотке w2, нарушает синусоидальную зависимость напряжения U2 от угла α и вызывает значительную погрешность вращающегося трансформатора, которая возрастает с увеличением нагрузки (тока I2).
В синусном режиме СКВТ, когда включена только одна вторичная обмотка, применяется первичное симметрирование, основанное на использовании компенсационной обмотки wк. Если внутреннее сопротивление источника Zi, и соединительных проводов Zл мало (Zi+Zл≈0), то обмотка wк замыкается накоротко. Если же Zi достаточно велико, что имеет место при питании ВТ от источника небольшой мощности, то обмотка wк замыкается на резистор сопротивлением ZК.Н.=Zi+Zл.
Магнитный поток Ф2q, сцепляясь с компенсационной обмоткой, наводит в ней ЭДС EK. Так как обмотка замкнута накоротко, то в ней появляется ток IK, который создает в магнитной цепи машины магнитный поток компенсационной обмотки ФK. Этот поток в соответствии с правилом Ленца, направлен против потока Ф2q (поток Ф2q является причиной возникновения EK и потока ФK). В результате поток Ф2q окажется в значительной степени скомпенсированным потоком ФK, и погрешность ВТ, вызванная нагрузкой, значительно уменьшится.
Синус-косинусные вращающиеся трансформаторы в синусно-косинусном режиме
В этом режиме в схему СКВТ включают обе обмотки ротора – w2 и w3, смещенные в пространстве относительно друг друга на 90° (рисунок 2.31 а). Зависимость напряжения обмотки w2 от угла поворота ротора α определяется выражением:
а напряжение на выходе обмотки w3.

Из выражения видно, что напряжение U3 при повороте ротора на угол α изменяется пропорционально косинусу этого угла.
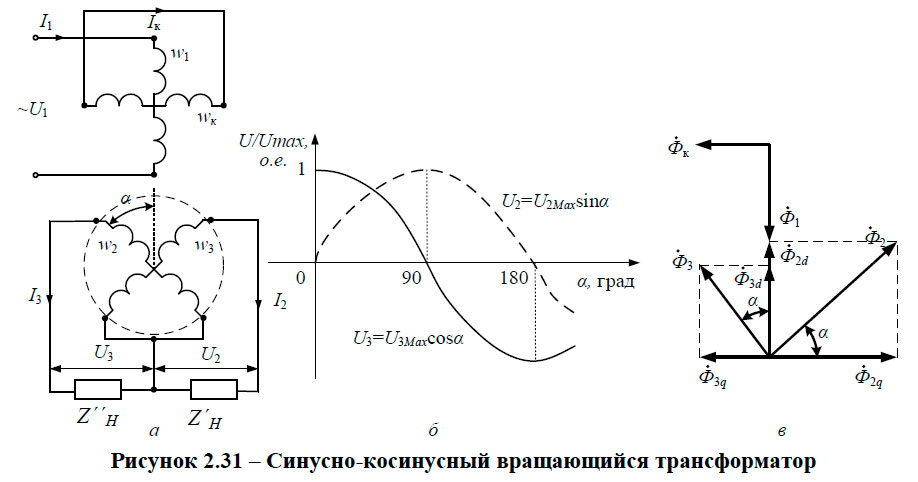
Таким образом, на выходе СКВТ получается два напряжения – U2 и U3: первое изменяется пропорционально sinα, а второе – пропорционально cosα (рисунок 2.31 б).
Обмотки w2 и w3 обычно имеют одинаковые параметры, а поэтому наибольшие значения напряжений U2m и U3m также одинаковы:

где U1– напряжение на входе ВТ, т. е. на зажимах обмотки возбуждения w2.
Таким образом, выражения напряжений на выходе СКВТ могут быть записаны иначе:
Полная взаимная компенсация поперечных составляющих потоков обмоток ротора происходит при равенстве нагрузочных сопротивлений в синусной и косинусной цепях вращающегося трансформатора.
Если же нагрузочные сопротивления Z´H и Z´´H не равны, то вторичное симметрирование получается неполным, так как поперечные составляющие и Ф3q взаимно компенсируются лишь частично, и в магнитной цепи ВТ появляется магнитный поток, направленный по поперечной оси:
Этот поток наводит в роторных обмотках ЭДС самоиндукции, что ведет к искажению заданных функциональных зависимостей выходных напряжений. Магнитный поток Фq при Z´H=Z´´H может быть скомпенсирован за счет первичного симметрирования, т. е. за счет потока ФК, создаваемого током IК короткозамкнутой компенсационной обмотки.
Линейные вращающиеся трансформаторы
При определённой схеме соединения обмоток и коэффициенте трансформации на выходе вращающегося трансформатора можно получить линейную зависимость амплитуды напряжения от угла поворота ротора.
Принцип работы вращающегося трансформатора в линейном режиме основан на том, что на его выходе можно получить функцию:
Данная функция при k = 0,54 даёт наилучшее приближение к линейной зависимости в пределах α от –60° до +60° (рисунок 32 в). Для получения зависимости выходного напряжения от угла поворота можно использовать две схемы включения вращающегося трансформатора (рисунок 32 а и б). Рассмотрим кратко первую схему. В ней обмотка возбуждения и косинусная обмотка соединены последовательно и подключены к источнику питания, а к синусной обмотке подключена нагрузка Zн. Поперечный поток компенсируется путём первичного симметрирования и при анализе может не учитываться.
Это выражение не учитывает собственных сопротивлений обмоток, поэтому в реальных машинах коэффициент трансформации находится в пределах 0,56…0,58.
В схеме с вторичным симметрированием (рисунок 2.32 б) источник питания подключён к обмотке возбуждения, а к соединенным последовательно квадратурной и синусной обмоткам подключена нагрузка. Симметрирование выполнено путём замыкания косинусной обмотки на сопротивление Zb.
Выходное сопротивление линейного вращающегося трансформатора в схеме с вторичным симметрированием зависит от угла поворота ротора, что значительно ограничивает возможность её применения. Поэтому на практике главным образом используют схему включения с первичным симметрированием.
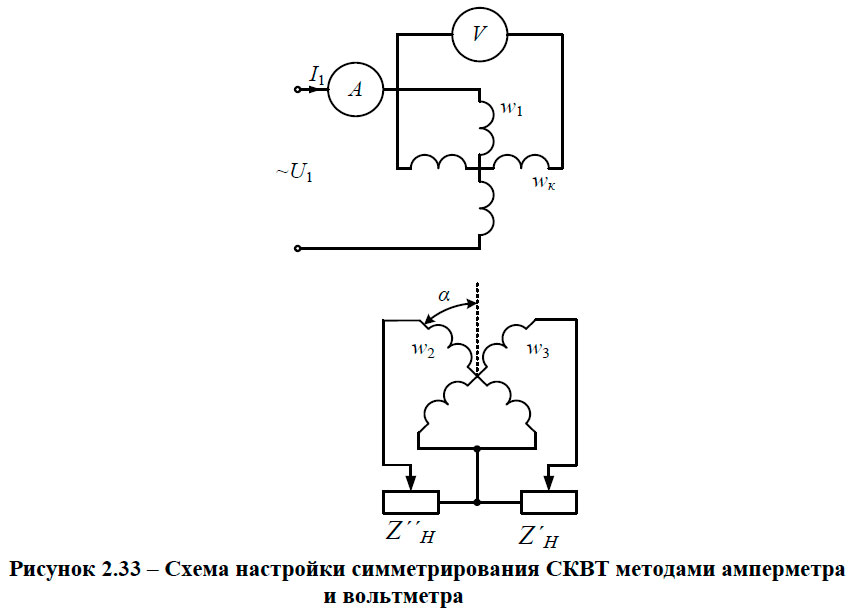
При полном вторичном симметрировании ВТ входное сопротивление ZВх не зависит от положения ротора (угла α). Поэтому ток и мощность, потребляемые ВТ, также не зависят от угла α. На этом основан метод подбора нагрузочных сопротивлений синусной Z´H и косинусной Z´´H обмоток для осуществления полного вторичного симметрирования, называемый методом амперметра (рисунок 2.33). Сущность метода состоит в том, что подбираются такие значения Z´H и Z´´H, при которых поворот ротора не вызывает изменения показаний амперметра А, включенного в цепь обмотки возбуждения.

Более точным методом вторичного симметрирования является метод вольтметра. Так как при полном вторичном симметрировании поперечные составляющие потоков синусной и косинусной обмоток взаимно уравновешиваются, то в компенсационной обмотке ЭДС не наводится. Следовательно, сопротивления Z´H и Z´´H подбираются таким, чтобы показание вольтметра V, включенного в цепь компенсационной обмотки, было нулевым во всех положениях ротора.
Литература
Элементы и функциональные устройства судовой автоматики - Авдеев Б.А. [2018]