Автоматаческие регуляторы являются составной частью любой САР (система автоматического регулирования). Автоматический регулятор может быть выполнен как отдельное устройство либо как совокупность элементов, входящих в САР.
Название САР определяется названием ее регулятора и совокупностью основных свойств:
- по виду основного регулируемого параметра регулятором различают САР давления, температуры, частоты вращения, вязкости, электрических величин (напряжения, частоты переменного тока) и т.д.;
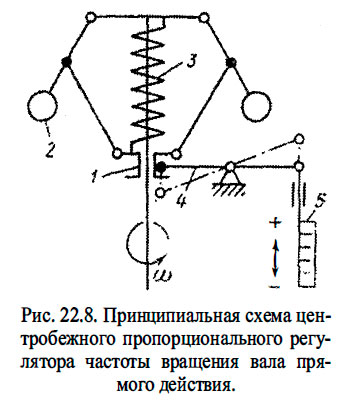
- по источнику энергии, движущей регулирующий орган (РО - элемент через который регулятором осуществляется регулирующее воздействие на ОУ(Объект управления)), могут быть прямого и непрямого действия. В системе прямого действия воздействие на РО производится за счет энергии, развиваемой измерительным устройством (см. рис. 22.8). В системе непрямого действия выходное звено регулятора воздействует на РО за счет дополнительной энергии от постороннего источника, подводимой к усилительному устройству. Регуляторы непрямого действия используют в тех случаях, когда требуется получить значительные усилия перемещения РО при сохранении малой нечувствительности и качественного переходного процесса. Такие регуляторы обеспечивают более точное поддержание регулируемого параметра и легко приспосабливаются для дистанционного управления, в тоже время они более сложны и дороже, чем регуляторы прямого действия;
- по виду дополнительной энергии регуляторы непрямого действия могут быть: электрические, гидравлические, пневматические и комбинированные, например пневмоэлектрические, электоро-пневмо-гидравлические и др. Вид используемой вспомогательной энергии в значительной мере зависит от ОУ, так как обычно используют тот вид энергии, который имеется в объекте. В комбинированных регуляторах в разных каскадах усиления могут использоваться различные виды энергии;
- по характеру воздействия на регулирующий орган САР могут быть непрерывного (аналогового) и позиционного (дискретного) действия. Системы позиционного действия обычно работают по принципу включено-выключено, производя двухпозиционное воздействие на РО. Существуют системы и многопозиционного действия;
- по закону регулирования, определяемому характером изменения во времени выходной величины регулятора от входной, САР делят на релейные позиционные (РП-регуляторы), интегральные (И-регуляторы), пропорциональные (П-регуляторы), пропорционально-интегральные (ПИ-регуляторы), пропорциональные пропорционально-интегральные (ППИ-регуляторы), пропорционально-дифференциальные - (ПД-регуляторы), пропорционально-интегрально-дифференциальные (ПИД-регуляторы), регуляторы без обратной связи и с обратной связью (жесткой, гибкой или комбинированной);
- по числу параметров, на которые реагирует регулятор, САР делят на одно-и многоимпульсные (двух- и трехимпульсные). Для получения определенных статических и динамических свойств САР применяют многоимпульсные регуляторы, которые могут реагировать на изменение не только значения регулируемого параметра, скорости его изменения, но также нагрузки ОР. В этом случае регулятор называется двухимпульсным. Если регулятор реагирует на все три величины, он называется трехимпульсным;
- по значению статической неравномерности САР могут быть статические и астатические.
- Статические (пропорциональные) регуляторы поддерживают регулируемую величину с заранее предусмотренной неравномерностью регулирования (с некоторым отклонением), зависящей от величины возмущающего воздействия (имеют статическую ошибку).
- Астатические (интегральные) регуляторы обеспечивают постоянное значение регулируемой величины независимо от величины возмущающего воздействия.
- Изодромные (пропорционально-интегральные) регуляторы содержат элементы как астатического, так и статического регулирования, поэтому обладают значительной устойчивостью и не имеют статической ошибки.
Статические регуляторы (П-регуляторы)
П-регуляторы прямого действия просты по конструкции, так как их регулирующий орган перемещается, используя энергию, чувствительного элемента (ЧЭ).
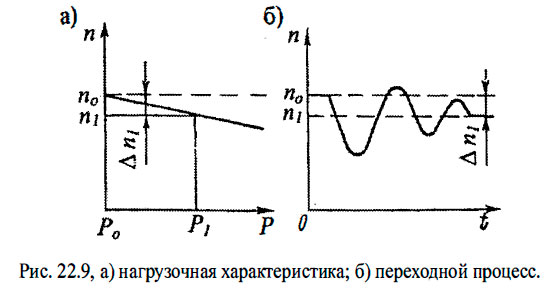
Принцип действия простейшего центробежного пропорционального регулятора прямого действия САР частоты вращения вала дизель-генератора, заключается в следующем. С изменением угловой скорости ω центробежные грузы 2 будут сходиться или расходиться, перемещая муфту 1 и сжимая или ослабляя пружину 3. Перемещение муфты будет передаваться через рычаг 4 на рейку 5 топливных насосов. В статическом режиме при отсутствии нагрузки на дизель-генератор, обозначим Ро, установится частота вращения вала nо (холостого хода), см. рис. 22.9, а. При подключении потребителей на шины генератора, нагрузка на него возрастет, допустим до значения Р1. САР из статического режима перейдет в динамический, а именно: частота вращения вала дизеля начнет снижаться, грузы регулятора начнут сходиться, перемещая муфту 1 вниз на увеличение подачи топлива, до тех пор, пока не установится новое равновесное состояние. При этом новое установившееся значение частоты вращения вала дизеля n1; окажется меньше no (см. рис. 22.9, б).
Это произойдет потому, что новое положение топливной рейки, вызванное необходимостью увеличения подачи топлива, установит муфту в другое положение, при котором грузы 2 окажутся ближе друг к другу, а пружина 3 - ослабленной. Регулятор является статическим. Разность между значениями частоты вращения, поддерживаемой регулятором при максимальной нагрузке и при отсутствии нагрузки (холостой ход), равна статической ошибке регулятора.
Несмотря на перечисленные недостатки, такие регуляторы находят применение в судовых установках, не требующих больших регулирующих воздействий и высокой точности регулирования.
С увеличением нагрузки статическая ошибка Δn этих регуляторов будет возрастать, что является их недостатком. Регуляторы прямого действия обладают значительной нечувствительностью из-за трения в рычагах и опорах, наличия зазоров, люфтов и т. д.
П-регуляторы непрямого действия с жесткой обратной связью. Для простоты уяснения преимуществ пропорционального регулятора с жесткой обратной связью, над регулятором без жесткой обратной связи, рассмотрим ту же САР частоты вращения вала дизель-генератора, также при набросе нагрузки, но с пропорциональным регулятором непрямого действия и жесткой обратной связью.
При подключении потребителей на шины генератора, нагрузка на него возрастет. САР из статического режима перейдет в динамический, а именно: частота вращения вала дизеля начнет снижаться, грузы регулятора начнут сходиться, пружина 1 разжимается, перемещая муфту 3 вниз (рис. 22.10).
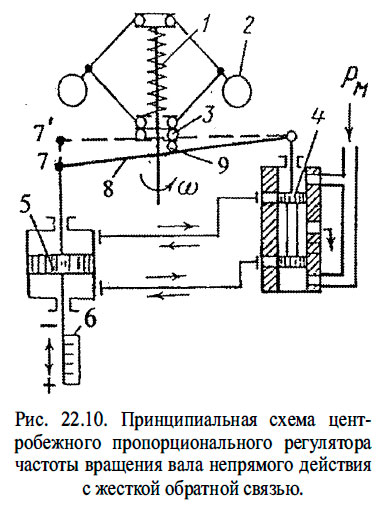
Вместе с муфтой вокруг шарнирной точки 7 по часовой стрелке будет перемещаться рычаг 8 (жесткая обратная связь), так как поршень 5 сервомотора заторможен маслом, находящимся в обеих полостях цилиндра. Поворот рычага 8 вызовет перемещение золотника 4 вниз, масло от насоса давлением Рм начнет поступать в верхнюю полость цилиндра сервомотора, одновременно сливаясь из нижней в маслосборник насоса.
Поршень сервомотора пойдет вниз, и рычаг 8, повернувшись вокруг точки 9 против часовой стрелки, вернет золотник в прежнее положение, поджав пружину 1. Шток 6 кинематически связан с рейкой топливных насосов, его перемещение вниз увеличит подачу топлива, и частота вращения вала двигателя повысится.
Как видно из схемы, по окончании переходного процесса рычаг 8 вернется в первоначальное положение только своим правым концом, а левый конец займет новое положение 7, так как он жестко связан со штоком поршня сервомотора, который переместился вниз на увеличение топливоподачи и зафиксировался в этом положении золотником. Пружина регулятора вследствие некоторого перемещения муфты вниз окажется ослабленной и, следовательно, частота вращения вала двигателя снизится. В варианте снижения нагрузки, все произойдет наоборот и по окончании процесса регулирования левый конец рычага окажется выше точки 4, пружина будет поджата и новая установившаяся частота вращения будет выше первоначальной. Таким образом, нагрузочная характеристика регулятора с жесткой обратной связью носит также статический характер. Введение жесткой обратной связи в регуляторах непрямого действия повышает устойчивость системы и улучшает показатели качества переходного процесса:
- уменьшается динамический заброс;
- уменьшается перерегулирование;
- уменьшается время переходного процесса;
- подавляется колебательность переходного процесса (рис. 22.11).
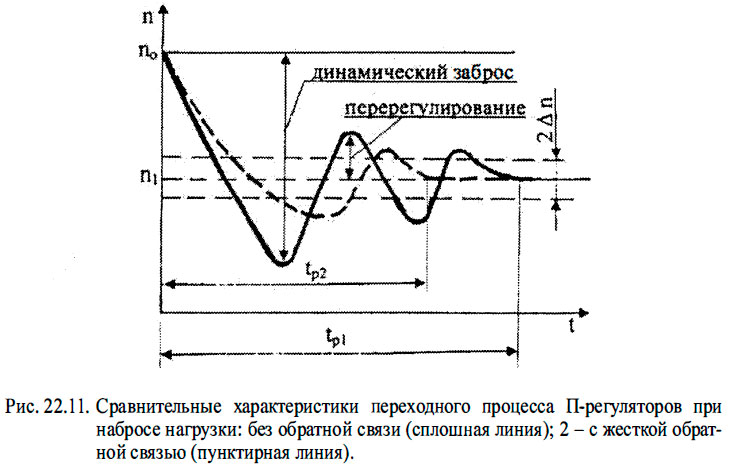
Именно в этом и заключается стабилизирующее действие обратной связи, что является ее положительным свойством. Изменяя соотношения плеч рычага (путем изменения положения шарнира 9) можно влиять на неравномерность регулирования, изменяя наклон нагрузочной характеристики. Однако следует помнить, что с уменьшением неравномерности положительные свойства обратной связи начинают снижаться.
Статические регуляторы непрямого действия с жесткой обратной связью применяют в случаях, когда объекты регулирования имеют недостаточное саморегулирование или не обладают им, а по условиям эксплуатации неравномерность регулирования допускается. На судах такие регуляторы используют в системах регулирования давления пара и уровня воды в котлах.
Астатические регуляторы (И-регуляторы).
И-регуляторы непрямого действия. Используют для перемещения РО дополнительную энергию постороннего источника. Регулятор имеет усилитель - отсечной гидравлический золотник 4 и исполнительный механизм (ИМ) - гидравлический поршневой сервомотор 5 двухстороннего действия. Шток поршня сервомотора связан только с регулирующим органом - топливной рейкой б. В качестве дополнительной энергии используется масло давлением Рм, которое подводится к усилительному золотнику 4 и от него к верхней или нижней полостям сервомотора 5. При частоте вращения вала двигателя, равной заданной, окна золотника усилителя перекрыты, поршень сервомотора неподвижен и подача топлива эквивалентна нагрузке двигателя.
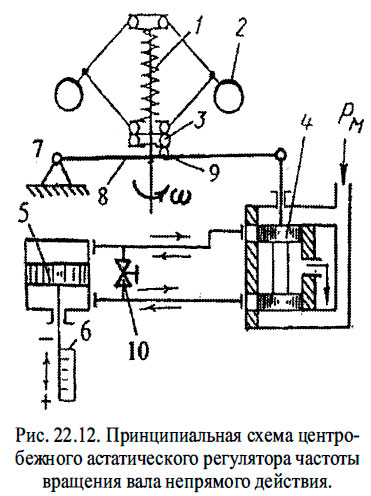
При уменьшении нагрузки на двигатель угловая скорость вращения вала ω будет возрастать, грузы 2 центробежного измерителя начнут расходиться, сжимая пружину 1, и через муфту 3 и рычаг 8 будут перемещать золотник 4 вверх.
Масло через открывающееся нижнее окно усилителя начнет поступать в полость под поршнем сервомотора, перемещая его вверх - на уменьшение топливоподачи. Одновременно масло над поршнем сервомотора через открытое верхнее окно усилителя будет уходить на слив. При снижении частоты вращения до первоначальной величины золотник, перемещаясь вниз, закроет окна усилителя, прекратив перемещение поршня. Топливная рейка окажется в новом положении, с меньшей подачей топлива, соответствующей меньшей нагрузке двигателя. Так как жесткая связь между муфтой и поршнем сервомотора отсутствует, муфта, а следовательно, и пружина регулятора по окончании переходного процесса вернутся в первоначальное положение. Регулятор является астатическим, так как не имеет ошибки регулирования (рис. 22.13, а). Это свойство данной САР является положительным.
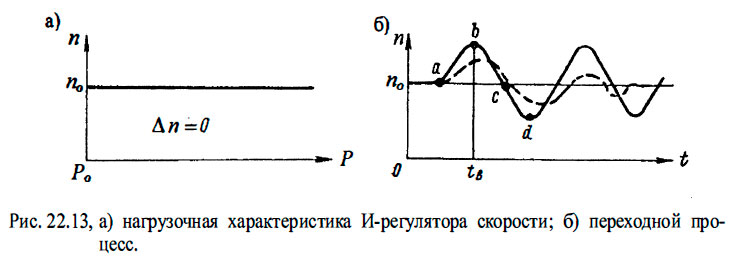
Приведенное описание работы САР является идеальным. Реально же из-за инерционности элементов регулятора в момент закрытия золотником окон усилителя, точка с на (рис. 22.13, б), поршень сервомотора окажется несколько ниже, чем необходимо для восстановления первоначальной частоты вращения вала. Это произойдет потому, что в точке b (динамическая ошибка) в момент времени tв. поршень сервомотора будет перемещаться на уменьшение подачи топлива с максимальной скоростью, т.к. отклонение n будет максимальным. В результате грузы ЧЭ окажутся ближе друг к другу, точка d на (рис. 22.13, б), муфта 3 через рычаг начнет приподнимать золотник вверх на увеличение подачи топлива до оборотов n0 и цикл динамического регулирования начнет повторяться по кривой незатухающих колебаний.
Такой характер процесса регулирования будет наблюдаться в том случае, если объект регулирования не обладает саморегулированием, как в приведенном примере с дизель-генератором. Поэтому И-регуляторы применяют только на объектах с саморегулированием, в которых требуется поддерживать постоянное значение регулируемых величин на всех нагрузочных режимах, т. е. там, где не допускается статическая ошибка, как, например, при регулировании давления в паровых и топливных котельных магистралях. И-регуляторы также применяются как предельные для - ограничения частоты вращения вала главного дизеля. Кривая переходного процесса на объектах, обладающих саморегулированием, носит затухающий характер (показана штриховой линией на рис. 22.13, б). Определенное влияние на динамические свойства И-регулятора оказывает время сервомотора.
Интегральные регуляторы реализуют закон, при котором скорость изменения выходной координаты пропорциональна интегралу входной.
Временем сервомотора называют время, за которое РО переместится из одного крайнего положения в другое при полном открытии каналов усилительного устройства и номинальном давлении рабочей среды. Время сервомотора можно изменять в эксплуатационных условиях путем изменения проходного сечения дроссельного клапана 1О (см. рис. 22.12). Увеличение времени сервомотора досчитается прикрытием клапана, уменьшение - открытием.
Пропорционально-интегральные регуляторы (ПИ-регуляторы).
Непрямого действия с гибкой обратной связью называют также изодромными, или пропорционально-интегральными (рис. 22.14). Гибкая связь прекращает воздействие на золотник усилителя не сразу, как жесткая обратная связь, а благодаря наличию пружины изодрома и самого изодрома (или катаракта - цилиндра с поршнем, обе полости которого заполнены маслом и сообщаются между собой через игольчатый клапан) через некоторое время после перемещения регулирующего органа. Действие ПИ-регулятора можно рассматривать как совокупность пропорционального и интегрального регуляторов, так как ПИ-регулятор объединяет в себе свойства статического и астатического регуляторов, а именно: преимущества первого (устойчивый переходный процесс) и второго (точное поддержание параметра на всех установившихся режимах). Введение гибкой обратной связи обеспечивает своевременное выключение усилителя в переходном процессе и возвращение измерительного устройства при любом положении сервомотора в исходное положение в конце переходного процесса.
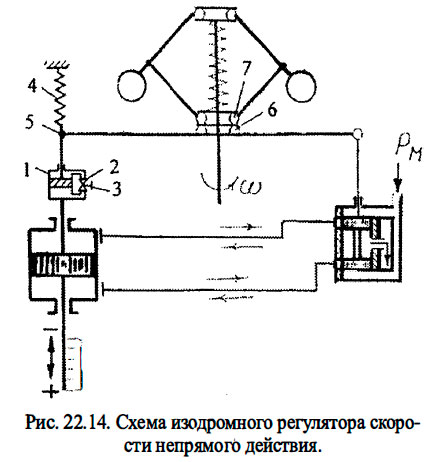
При сбрасывании нагрузки и первоначальном увеличении частоты вращения двигателя процесс изодромного регулирования протекает следующим образом. Расхождение центробежных грузов, вызывает перемещение поршня и штока сервомотора вверх. Вместе со штоком сервомотора поднимается цилиндр масляного катаракта 1. В первый момент система ведет себя как жесткая связь, так как перетекание масла из одной полости катаракта в другую затрудняется сопротивлением в дроссельном клапане 2, проходное сечение которого регулируется иглой 3 изодрома.
Таким образом, вначале подъем цилиндра катаракта происходит с той же скоростью, что и подъем поршня сервомотора, и в этот момент времени регулятор работает как статический. По мере подъема катаракта возрастает сопротивление пружины 4, перетекание масла из одной полости катаракта в другую станет более интенсивным и скорость перемещения цилиндра катаракта относительно его собственного поршенька возрастает. Это приводит к тому, что после установления золотника в среднее положение точки 5 и 6, а следовательно, и муфта 7 возвратятся в свое первоначальное среднее положение (тогда как в регуляторе с жесткой обратной связью точка 7 (рис. 22.1О) не возвращалась в свое первоначальное положение). Поэтому, можно считать, что во втором периоде переходного процесса изодромный регулятор работает как астатический и полностью снимает статическую ошибку первого периода регулирования.
Масляный катаракт, дроссельный клапан с иглой изодрома и пружина 4, образуют устройство, называемое изодромом.
Для нормальной работы регулятора большое значение имеет правильный подбор проходного сечения дроссельного клапана 2. Если иглу изодрома 3 полностью закрыть, то вследствие невозможности перетекания масла в катаракте перемещение его поршенька относительно стенок цилиндра окажется также невозможным, гибкая связь превратится в жесткую, а регулятор - в пропорциональный (П-регулятор). Игла изодрома позволяет изменять время изодрома и является настроечным органом регулятора. Понятно, что время изодрома - это время перемещения поршенька изодрома из одного крайнего положения в другое.
Положительные свойства ПИ-регуляторов обеспечили им широкое применение в судовых энергетических установках, особенно при необходимости астатического регулирования объектов, не обладающих свойством саморегулирования.
Двухимпульсные регуляторы.
Применяются в САР, когда по условиям эксплуатации энергетической установки требуется сокращенное время переходного процесса и уменьшение динамических ошибок.
На морских судах двухимпульсные регуляторы используются в дизель-генераторных установках. Регулирование скорости дизеля осуществляется по двум управляющим сигналам: изменением частоты вращения центробежного ЧЭ и по изменению электрической нагрузки.
Однорежимные, или предельные регуляторы.
Ограничивают частоту вращения вала главных судовых двигателей предельно допустимого скоростного режима. Вступают в работу при оголении винта в штормовую погоду и не оказывают влияния на подачу топлива при работе двигателя на скоростных режимах ниже предельно допустимого. Значение предельной частоты вращения задается соответствующим затягом задающей пружины регулятора.
Всережимные регуляторы.
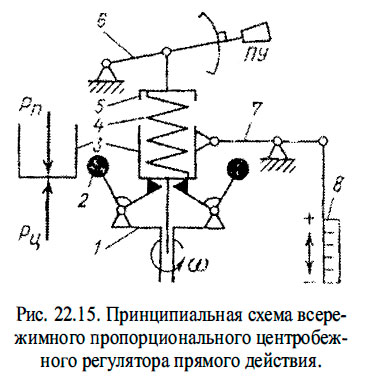
Позволяют задавать необходимую частоту вращения вала двигателя и далее поддерживать ее неизменной. Такие регуляторы имеют жесткую связь с рейкой топливных насосов. При этом рукояткой с поста управления воздействуют не на топливную рейку, а непосредственно на задающую пружину регулятора (см. рис. 22.15).
При вращении вала регулятора кинематически связанного с валом двигателя, под действием центробежной силы Рц , зависящей от значения угловой скорости ω, грузы расходятся и воздействуют на подвижную муфту 3, поднимая ее вверх и сжимая пружину 4.Верхний конец пружины упирается в тарелку 5 рычага 6 поста управления (ПУ). Муфта через рычаг 7 шарнирно связана с рейкой 8 топливных насосов. При отсутствии возмущения, регулятор находится в равновесном состоянии, так как центробежная сила Рц равна силе пружины Рn.
Регулятор будет поддерживать только один скоростной режим, соответствующий положению рукоятки 6 на пульте управления. При изменении положения рукоятки 6, например при перемещении вниз, тарелка 5 сожмет пружину 4 и сила Рn возрастет. Муфта 3 опустится и через рычаг 7 переместит рейку 8 вверх - в сторону увеличения подачи топлива. Частота вращения вала начнет увеличиваться (грузы 2 - расходятся) до значения при котором Рц станет равной силе Рn. Когда установится новый (в данном примере повышенный) скоростной режим, регулятор вновь начнет работать как однорежимный.
Литература
Судовой механик: Справочник. Том 3 - Фока А.А. (2016)