Комплекс системы ДАУ главным двигателем включает:
- система автоматического контроля силовой установки и сигнализация;
- система автоматического дистанционного управления и обслуживание главного двигателя и вспомогательных механизмов;
- система автоматического регулирования и стабилизации энергетических процессов.
Управление главными двигателями большой мощности современных транспортных судов, как правило, осуществляется системой ДАУ, которая состоит из электронно-логического блока, выполненного на интегральных микросхемах с применением электромагнитных реле в качестве выходных элементов, и штатной пускореверсивной пневматической системой, выполненной на элементах фирмы «Вестингауз». В данном справочнике рассмотрены особенности компоновки и эксплуатации следующих систем ДАУ:
- система ДАУ типа STL-930;
- система ДАУ AUTOCHIEF-III
- система ДАУ типа FAHM (ASEA);
- система ДАУ типа SBC-7.
По видам энергии большинство систем ДАУ являются комбинированными, так как в них используются электрические, пневматические и гидравлические элементы.
Таким образом, система ДАУ двигателем оборудована исполнительными периферийными элементами, которые предназначены для преобразования командных сигналов при управлении двигателем. В зависимости от выполняемых функций можно выделить следующие группы элементов периферийного оборудования: локальные регуляторы частоты вращения вала; задающие устройства; усилители и сервомоторы; исполнительные элементы.
Частота вращения вала ГД является одним из основных параметров, определяющих эксплуатационные характеристики судовой силовой установки.
Стабилизация заданной частоты вращения вала обеспечивается регуляторами, которые входят в состав система автоматического регулирования частоты вращения двигателя.
Наиболее широкое распространение получили механические регуляторы фирмы «ВУДВОРД», устанавливаемые на ГД морских судов, и электронные регуляторы типа DGS-8800.
Для двигателей морских судов фирма «ВУДВОРД» выпускает регуляторы по своему конструктивному устройству двух типов:
- UG - универсальный регулятор рычажного и шкального исполнения;
- PG - регулятор с пневмозаданием.
Конструкцию и устройство регуляторов, их настройку, обслуживание необходимо рассматривать в специальной литературе.
Задающие устройства систем ДАУ
Задающие устройства - предназначены для преобразования командных сигналов в пропорциональные им выходные сигналы, используемые непосредственно или после усиления в системах управления.
Все вышеперечисленные системы ДАУ в настоящем издании имеют общую особенность - пускореверсивная система является пневматической. В пневматическую систему включен электропневмопреобразователь, который предназначен для преобразования управляющего сигнала в виде постоянного тока (0-500 мА) от электронной части системы ,ДАУ в давление управляющего воздуха соответственно заданной команде.
На рис. 22.33 приведено устройство электропневмопреобразователя фирмы «Вестингауз». Электропневмопреобразователь состоит из двух частей: верхней-электромагнитной и нижней - пневматической.
Электрическая часть преобразователя состоит из катушки 2 и постоянного магнита 1. При прохождении тока, катушка 2 движется вниз под действием силы, прямо пропорциональной величине этого тока, воздействуя через толкатель и плоскую пружину 3 на шарик 4 пневматической части. Положение шарика в гнезде клапана является входной координатной системы пневмообразования. Регулировочный винт 9 используется для регулировки заданной нагрузки. Заводом изготовителем винт 9 отрегулирован таким образом, что при нулевой мощности электрического сигнала на входе преобразователя на его выходе устанавливается нулевое значение давления воздуха.
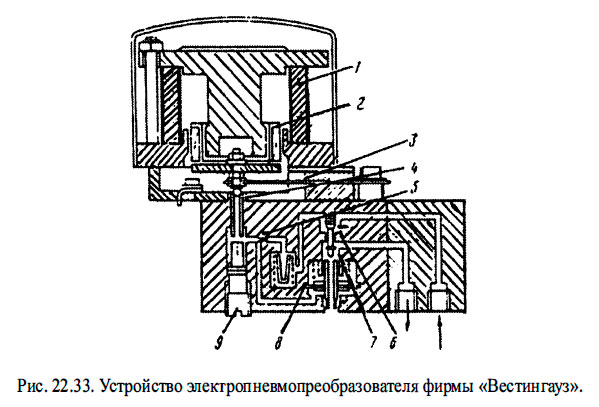
При подаче сигнала (0...500) мА на вход электропневмопреобразователя катушка 2 воздействует через толкатель и плоскую пружину 3 на шарик 4, который опускается в гнездо клапана и ограничивает стравливание воздуха в атмосферу. Давление в нижней части мембранного клапана повышается, выходной клапан 7 закрывается, а впускной клапан б открывается. Воздух поступает на выход до тех пор, пока давление под мембранным клапаном 8 не уравнивается давлением сверху. При этом впускной клапан б закрывается и на выходе преобразователя устанавливается определенное значение давления управляющего воздуха.
При уменьшении сигнала на входе преобразователя силовое воздействие картушки 2 уменьшается, под действием плоской пружины 3 шарик 4 освобождает гнездо клапана и увеличивается стравливание воздуха в атмосферу. Это приводит к уменьшению давления под мембраной 8, которая, двигаясь вниз, открывает выходной канал. Давление на выходе преобразователя уменьшается до тех пор, пока положение клапана 7 не уравновесится давлением снизу и сверху. Дальнейшее движение плоской пружины повторяет процесс до равновесия и появления на выходе преобразователя давления управляющего воздуха, пропорционально электрическому сигналу на входе.
Часто в пневматической системе ДАУ используют пневматические задатчики, преобразующие командный сигнал в пропорциональное давление воздуха.
В пневматическом задатчике фирмы «Вестингауз» показанном на рис. 22.34 статическое состояние характеризуется равновесием сил, действующих на мембрану 5 силы от сжатой настроечной пружины 7 и силы давления сжатого воздуха на выходе пневмозадатчика. Состояние равновесия нарушается при перемещения штока 3 (например, вниз). При этом сжимается задающая пружина 4 и прогибает вниз мембрану, которая сжимает настроечную пружину 7 и перемещает в том же направлении подвижное гнездо клапана 8 наполнения, открывая его.
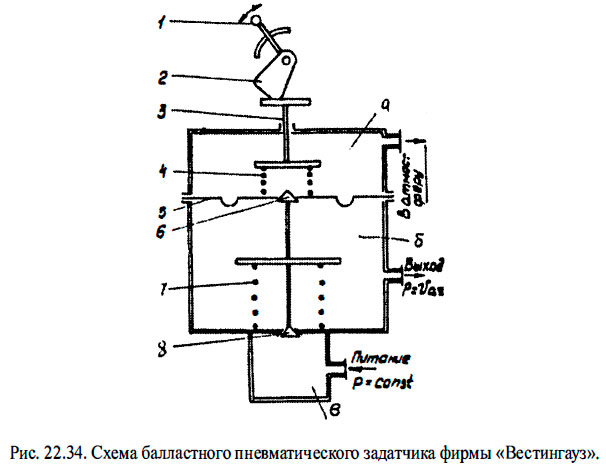
Рабочий воздух давлением Рраб поступит в камеру «в», затем через открытый клапан 8 заполнит камеру «б» наполнения и далее с давлением Рзад к приемному устройству. Под действием давления в камере «б» мембрана прогибается вверх, сжимая настроечную пружину. При достижении давления рабочего воздуха Рзад заданного значения, мембрана, переместившись вверх, займет такое положение, при котором клапан 8 закроется.
Если давление Рзад превысит заданную величину, мембрана еще больше переместиться вверх, открывая выпускной клапан б, этим самым часть воздуха из камеры «б» перепускается в камеру «а» и через открытое отверстое в атмосферу. Что приводит к снижению давления При понижении давления в камере «б» мембрана под действием задающей пружины переместится вниз, стравливающий клапан б закрывается и открывается клапан наполнения 8. После окончания переходного процесса на выходе установится новое значение давления управляющего воздуха пропорциональное перемещению штока 3 под действием задающего кулачка 2, связанного с командным органом 1. В состоянии равновесия кланан наполнения и стравливающий закрыты.
Электропневматаческий преобразователь фирмы «СИМЕНС», представленный на рис. 22.35, преобразует электрический сигнал постоянного тока Iвх = (0 ... 20) мА в пневматический сигнал (0,2 ... 1,0) бар (0,02...0,1 МПа).
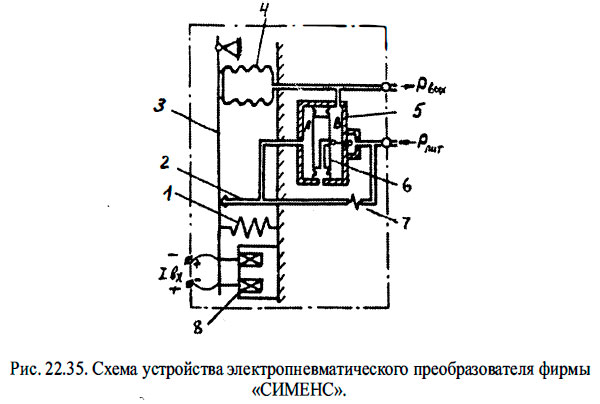
При отсутствии напряжения в катушке электромагнита 8 рычаг плунжера 3 под действием силы натяжения пружины устанавливается в положение, при котором приоткрывается выпускное отверстие воздушной трубки 2, и воздух из полости «а» пневмозадатчика 5 выпускается в атмосферу. При этом поршень 6 пневозадатчика перемещается влево, перекрывая поступление рабочего воздуха с давлением Рраб от магистрали пневмопитания в полость «6», на выходе устанавливается нижний предел давления Рзад пневмозадания. При появлении напряжения в катушке электромагнита 8 под действием намагничивающей силы рычаг плунжера 3 изменяет свое положение, прикрывая выпускные отверстия трубки 2, в результате чего в полости «6» через дроссель 7 под действием давления рабочего воздуха повышается давление, поршень пневмозадатчика перемещается вправо, воздух поступает в полость 6, что приводит к повышению давления управляющего воздуха на выходе.
Повышение давления в полости «6» пневмозадатчика через сильфон 4 обратной связи создает на рычаге плунжера 3 усилие, противодействующее намагничивающей силе электромагнита. При равновесии намагничивающей силы и усилия от сильфона рычаг плунжера занимает новое положение. Таким образом, намагничивающая сила с помощью пневмозадатчика и отрицательной обратной связи преобразуется в давление Рзад воздуха управления на выходе из преобразователя, пропорционально току Iвх в катушке электромагнита.
Усилительные устройства ДАУ
Усилительные устройства в системах ДАУ служат для преобразования и усиления сигналов с целью изменения положения регулирующих органов объектов управления, обеспечиваются усилителями и сервомоторами с помощью вспомогательной энергии, в зависимости от вида которой различают гидравлические, пневматические, электрические усилители и сервомоторы.
Рабочей средой для гидравлических усилителей и сервомоторов используются минеральные масла с небольшой вязкостью. В системах управления применяются однопроточные струйные и золотниковые гидравлические усилители.
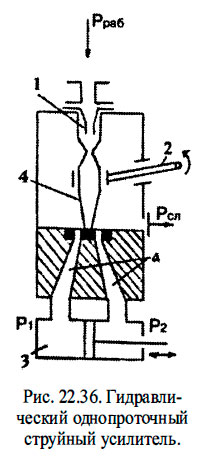
Однопроточный струйный усилитель приведен на рис. 22.36, в нем расположено напорное сопло 4, укрепленное на поворотном валике 2.
Верхняя часть сопла выполнена расширяющейся для улавливания рабочей жидкости из неподвижного сопла 1. Струя жидкости из сопла 4 попадает через приемные каналы «а» в полости сервомотора 3. Давление Р1 и Р2 жидкости в приемных каналах и полостях сервомотора устанавливается одинаковыми или различными в зависимости от того, какая часть струи попадает в каждый из каналов при отклонении сопла от среднего положения. При этом поршень сервомотора занимает положение, соответствующее отклонению сопла валика 2.
Золотниковый усилитель, показанный на рис. 22.37, управляет поступлением рабочей жидкости в полости сервомотора 1 давлением Рраб и сливом отработанной жидкости с помощью расположенной в корпусе 2 золотниковой пары 3 - золотник 4. В нейтральном (среднем) положении отсечные кромки золотника перекрывают окна, соединяющие полости усилителя с полостями сервомотора, поршень которого находится в покое.
При смещении золотника из нейтрального положения одно из окон втулки сообщается с напорной полостью сервомотора, другое - со сливной. В зависимости от соотношения размеров отсечных поясков золотника и ширины окон втулки золотниковые усилители бывают с положительным, нулевым и отрицательным перекрытием.
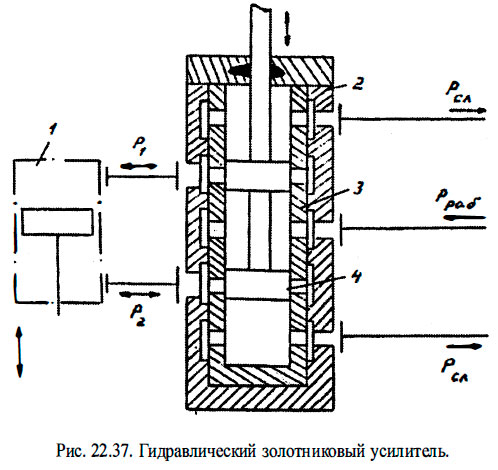
Для повышения чувствительности некоторые усилители выполняют в виде самоцентрующихся золотников, в которых поддерживается масляный зазор или между золотником и втулкой.
Исполнительные элементы систем ДАУ
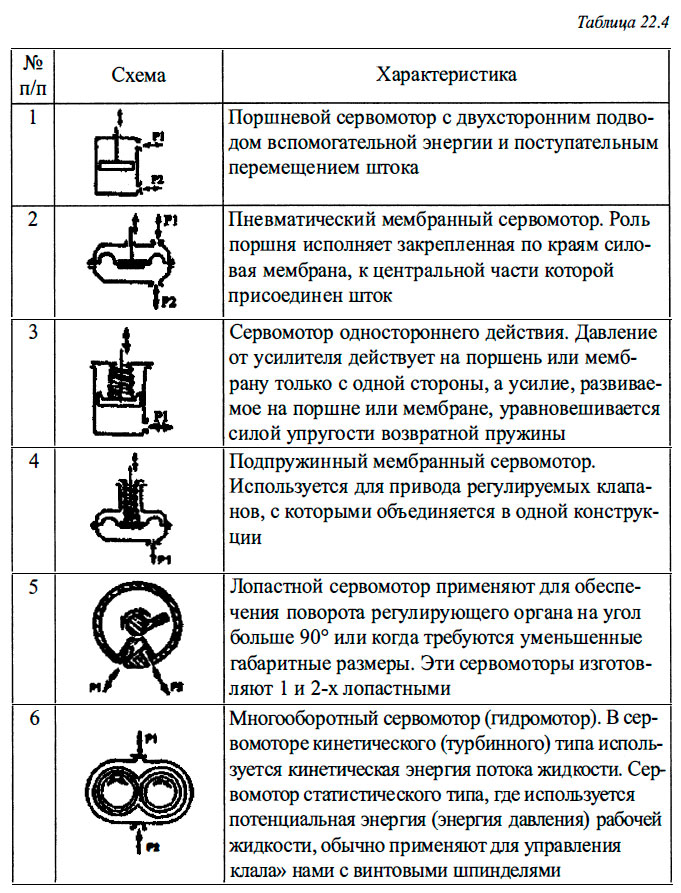
Исполнительные элементы преобразуют сигналы усилителя в поступательные либо вращательное перемещение регулирующих органов. В зависимости от вида вспомогательной энергии различают гидравлические и пневматические сервомоторы.
Схемы и характеристики сервомоторов приведены в таблице 22.4.
Для установки регулирующих органов в промежуточное положение используют сервомоторы с позиционером, схема устройства которого приведена на рис. 22.38.
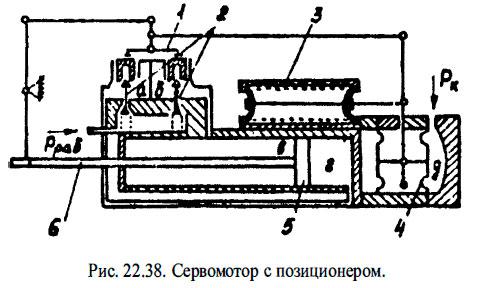
В камеру «д» сервомотора подается командный пневматический сигнал Рвх, и мембрана 4 занимает положение, определяемое равновесием сил давления Рвх и пружины 3. В установившемся режиме коромысло 1 занимает положение, при котором клапаны 2 поддерживают одинаковое давление в камерах «а», «б» и полостях «в», «г». При изменении Рвх мембрана перемещается, вызывая через систему рычагов отклонение коромысла 1. При этом один из клапанов 2 увеличивает подачу воздуха пневмопитания Рпит в «свою» полость, а другой клапан 2 сообщает противоположную полость с атмосферой, что приводит к нарушению равенства давлений в полостях «в» и «г» и перемещению поршня 5, который будет перемещаться до тех пор, пока под действием обратной связи коромысло 1 не займет нейтральное положение. При этом положение штока 6 будет соответствовать новому значению сигнала Рвх.
Электромагнитные (соленоидные) исполнительные элементы, у которых управляющий сигнал преобразуется в поступательное движение или поворот на некоторый угол исполнительных органов (золотника, клапанов, заслонок) характеризуется высоким быстродействием.
В качестве исполнительных элементов электронного регулятора частоты вращения используют электромагнитные преобразователи, схема которых представлена на рис. 22.39.
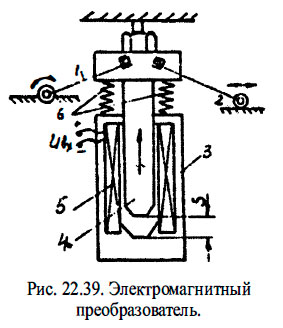
Конструкция корпуса электромагнитного преобразователя и подвижного сердечника 4 обеспечивает линейную зависимость перемещения силового вала 1 от значения тока в соленоидной обмотке 5. При минимальном напряжении Uвх намагничивающая сила обмотки недостаточна для преодоления усилия пружины 6, поэтому сердечник занимает верхнее положение. При увеличении Uвх растет ток в обмотке 5, возрастает намагничивающая сила, преодолевая сопротивление силы упругости пружин. При этом сердечник перемещается вниз, устанавливая силовой вал в положение, соответствующее заданной топливоподаче. С помощью потенциометра 2 в схему управления преобразователем подается сигнал обратной связи по положению силового вала. При прекращении подачи тока в обмотке сила упругости пружин возвращает силовой вал в положение нулевой подачи топлива, при этом преобразователь действует как предохранительное устройство.
Литература
Судовой механик: Справочник. Том 3 - Фока А.А. (2016)