Конструкция и принцип действия сельсина
Сельсинами называют электрические микромашины, обладающие способностью самосинхронизации и применяемые в индукционных системах синхронной связи в качестве датчиков и приемников. Слово «сельсин» происходит от английских слов self–synchronizing, что означает самосинхронизирующийся. Сельсин-передачи работают аналогично обычным механическим передачам, но в них крутящий момент между валами создаётся не при помощи непосредственно контактирующих шестерён, а посредством изменяющегося магнитного потока.
В системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом.
Сельсины применяются для различных целей:
- 1. Передача измерительной информации и команд на расстояние.
- 2. Синхронизации перемещения информации и команд на расстояние.
- 3. Измерения и визуального представления в цифровой форме линейных и угловых перемещений подвижных узлов станков и роботов.
- 4. Полуавтоматического управления исполнительными устройствами.
- 5. В качестве следящих систем.
Сельсины представляют собой индукционные электрические машины переменного тока. Статор и ротор сельсина выполняются в виде магнитопроводов специальной конструкции. Для уменьшения потерь они набираются из тонкой электротехнической стали. В пазах статора и ротора укладывается обмотка возбуждения (первичная обмотка) и обмотка синхронизации (вторичная обмотка).
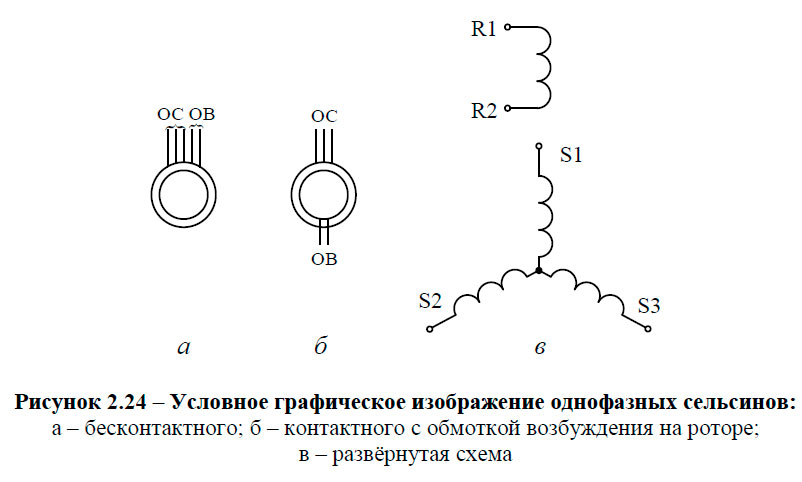
Условное графическое изображение и буквенное обозначение сельсинов на схемах показано на рисунке 2.24. Выводы обмотки синхронизации маркируют буквами S1, S2, S3, выводы обмотки возбуждения – буквами R1, R2. Буквенное обозначение сельсинов: BE – приёмник, ВС – датчик.
Сельсины подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга. Трехфазный сельсин имеет трехфазную обмотку возбуждения и трехфазную обмотку синхронизации. Такие сельсины по конструкции не отличаются от обычных асинхронных двигателей и применяются в основном при больших мощностях.
Однофазный сельсин содержит однофазную обмотку возбуждения (ОВ), трёхфазную обмотку синхронизации (ОС), магнитопровод, вал и конструктивные элементы. Сельсины бывают бесконтактными и контактными. В первых, обе обмотки расположены на статоре, во-вторых сельсинах – одна обмотка расположена на статоре, другая – на роторе. Обмотка синхронизации распределена по пазам, обмотка возбуждения выполняется сосредоточенной в виде катушек на полюсах либо распределённой по пазам. В контактном сельсине электрическая связь с обмоткой, расположенной на роторе, осуществляется с помощью контактных колец и щёток. Принцип работы сельсина не зависит от места расположения каждой из обмоток: на статоре или на роторе. Однако наибольшее распространение получили сельсины с обмоткой возбуждения на роторе и обмоткой синхронизации на статоре (рисунок 1, б). У них меньше контактных колец и щеток, что обеспечивает более высокую надежность, меньший момент трения и объем сельсина. В цепи передачи сигнала (линии связи обмоток синхронизации) отсутствуют скользящие контакты. При такой конструкции проще выполнить демпферную обмотку на роторе.
Наличие скользящих контактов значительно снижает надежность контактных сельсинов. Бесконтактные сельсины подразделяются на:
- а) с униполярным возбуждением ротора со стороны статора;
- б) с переходным кольцевым трансформатором.
Недостатком бесконтактных сельсинов является худшее использование активных материалов. Их масса примерно в 1,5 раза больше, чем контактных. Объясняется это большими воздушными зазорами, вследствие чего сельсины имеют значительные потоки рассеяния и большие намагничивающие токи.
Преимущества:
- простота;
- надёжность;
- ремонтопригодность.
Недостатки:
- невысокая точность синхронизации, особенно когда на валу сельсина-приёмника действует существенный механический момент;
- относительно невысокая точность передачи угла, обусловленная погрешностями изготовления магнитопровода сельсина;
- колебание ротора, не имеющего нагрузочного момента сельсина с частотой питающего переменного тока.
Для повышения точности применяют пару сельсинов – «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию связи сигнал с точного сельсина. Для подавления колебаний ротора, не имеющего нагрузочного момента используются механические демпферы.
Однофазные сельсины могут работать в двух режимах: индикаторном и трансформаторном.
Индикаторный режим
Сельсин–датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение (рисунок 2.25). Индикаторная схема применяется для синхронной дистанционной передачи угла поворота и различных величин, предварительно преобразованных в угловое перемещение, когда на выходе нет значительного крутящего момента.
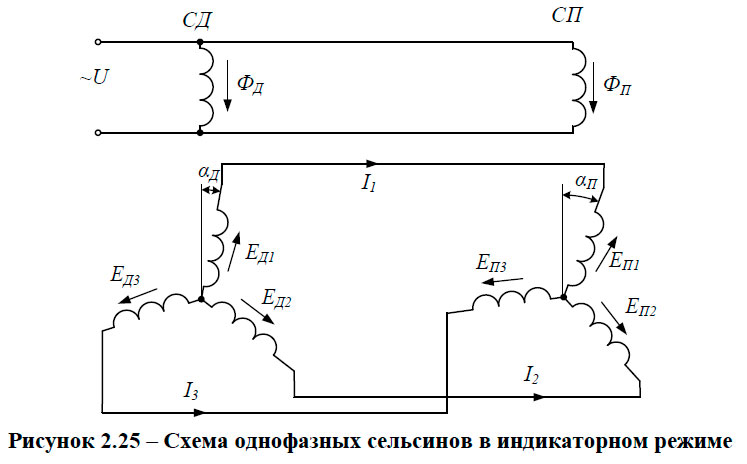
Если ротор сельсина-датчика вывести из согласованного положения и зафиксировать (затормозить), то угол рассогласования Δα = αД – αП будет отличным от нуля. В этом случае в обмотках синхронизации и линий связи потекут уравнительные токи Ii, так как ΔEi ≠0.

где ZФ – полное сопротивление фазной обмотки сельсина.
При взаимодействии магнитных потоков, создаваемых уравнительными токами, с потоком возбуждения ФД и ФП на валах роторов сельсина-датчика и сельсина-приемника возникают синхронизирующие моменты, которые стремятся повернуть роторы в согласованное положение. Так как ротор сельсин-приемник не заторможен, то под действием вращающего момента он придет в согласование (синфазное) положение с ротором сельсина-датчика, т.е. положение, когда Δα=αД–αП=0.
Величина момента, поворачивающего ротор сельсина-приемника, является функцией угла рассогласования:
где ММ – максимальный момент сельсина, определяемый его параметрами.
Моментно-угловая зависимость является статической характеристикой сельсинной пары, работающей в индикаторном режиме.
В индикаторном режиме передача угла происходит со статической угловой погрешностью. При работе без нагрузки погрешность, вызванная собственным моментом трения МТ сельсина-приемника, является основной и характеризует величину зоны нечувствительности приемника, в пределах которой ротор приемника может занять любое положение при одном и том же положении датчика.
В процессе эксплуатации на точность передачи влияют колебания напряжения и частоты питающей сети и сопротивление линии связи сельсинов. Уменьшение напряжения и увеличение частоты приводят к уменьшению потока возбуждения Ф. Увеличение расстояния между сельсинами и сопротивления линии связи снижает величину тока в обмотках синхронизации и МДС Fmax. В обоих случаях уменьшается синхронизирующий момент и точность передачи. Резкое снижение точности передачи наступает при появлении момента нагрузки на валу приемника.
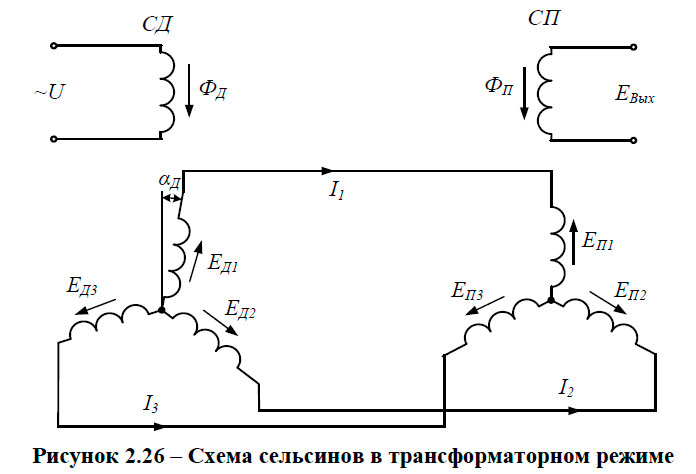
Трансформаторный режим
Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними (рисунок 2.26). Трансформаторная схема синхронной передачи угла применяется тогда, когда на ведомой оси имеется значительный момент сопротивления.
Обмотка возбуждения сельсина-датчика, как и в случае индикаторного режима, подключена к питающей сети и служит для создания в магнитной системе машины пульсирующего магнитного потока. Обмотки синхронизации датчика и приемника соединены между собой линия связи. Обмотка возбуждения сельсина-приемника предназначена для выработки сигнала (напряжения), зависящего от угла рассогласования. В исходном положении ротора СД ось обмотки 1 совпадает с осью обмотки возбуждения ОВ, в которой наводится максимальная э.д.с. При повороте ротора СД обмотки 1,2 и 3 смещаются. Эти токи создают в сельсине–приемнике магнитный поток, направленный под углом Δα=αД–αП к продольной оси выходной однофазной обмотки. В выходной обмотке наводится ЭДС, которая является выходным сигналом сельсинной пары:
где Uм – максимальное значение напряжения, наводимого в ОВ.
При этом по линии связи передается незначительный по мощности сигнал, затем сигнал усиливается, приводит во вращение исполнительный двигатель, который, перемещая объект управления, одновременно уменьшает угол рассогласования между сельсином-датчиком и сельсином-приемником.
Уменьшение максимально допустимых погрешностей сельсинов в трансформаторном режиме по сравнению с индикаторным объясняется тем, что точность работы сельсинов в трансформаторном режиме определяется только их магнитной и электрической симметрией, а не величиной паразитных моментов на валу.
Для обоих режимов существуют схемы включения:
- парная (датчик и приёмник);
- многократная (датчик и несколько приёмников);
- дифференциальная (два датчика и приёмник).
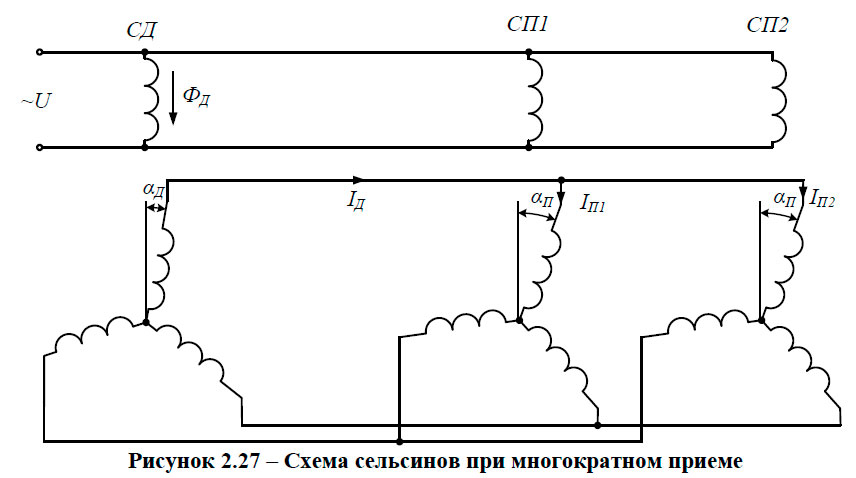
Многократный режим включения
Иногда требуется передать на расстояние угловую величину не в одно, а в несколько мест. Например, когда положение какого-либо регулирующего органа необходимо передать на главный пульт управления и местные наладочные пульты и т.д. Тогда к одному датчику подключают несколько сельсинов–приемников. Такой режим называют многократным приемом (рисунок 2.27).
Пусть к датчику подключено n однотипных с ним приемников. Синхронизирующий момент пропорционален МДС Fmax, последняя в свою очередь пропорциональна току обмотки синхронизации Imах. Так как приемники подключены к датчику параллельно, синхронизирующий момент приемника будет в n раз меньше момента датчика, поскольку
В силу снижения моментов у сельсинов-приемников точность передачи будет значительно снижена.
Для того чтобы сохранить синхронизирующий момент приемников, выбирают сельсин-датчик в n раз мощнее сельсинов–приемников, т.е. сопротивление его обмотки синхронизации будет в n раз меньше сопротивления обмотки синхронизации каждого сельсина-приемника.
Дифференциальный режим включения
В системах дистанционной передачи угла применяются дифференциальные сельсины, назначение которых – воспроизводить угол поворота, равный сумме или разности углов, заданных двумя сельсинами-датчиками. Дифференциальный сельсин имеет две трехфазные обмотки, одна из которых расположена в пазах неявнополюсного статора, а другая – в пазах неявнополюсного ротора. Вывод обмотки ротора для подключения к внешней сети осуществлен посредством трех контактных колец и щеток. Рассмотрим принцип работы индикаторной системы дистанционной передачи угла, содержащей два сельсина-датчика СД1 и СД2, и один дифференциальный сельсин приемник СП–СД (рисунок 2.28). Допустим, что ротор дифференциального сельсина заторможен. При включении в сеть переменного тока обмоток возбуждения сельсинов-датчиков СД1 и СД2 создаются пульсирующие магнитные потоки ФВ1 и ФВ2. Поток ФВ1 наводит в обмотках фазы синхронизации датчика СД1 электродвижущие силы, под действием которых в цепи синхронизации этого сельсина появятся токи. Проходя по обмотке синхронизации дифференциального сельсина, эти токи создают МДС FДС1. При повороте ротора датчика СД1 на угол αД1 по часовой стрелке вектор МДС FДС1 повернется на такой же угол, но против часовой стрелки. Аналогичные процессы происходят и в цепи синхронизации обмоток датчика СД2 и дифференциального сельсина: при повороте ротора датчика СД2 на угол αД2 по часовой стрелке вектор МДС FДС2 обмотки ротора дифференциального сельсина также повернется на угол αД2, но против часовой стрелки. В итоге между векторами МДС FДС1 и FДС2 дифференциального сельсина появится пространственный угол, равный разности углов, заданных датчиками СД1 и СД2.
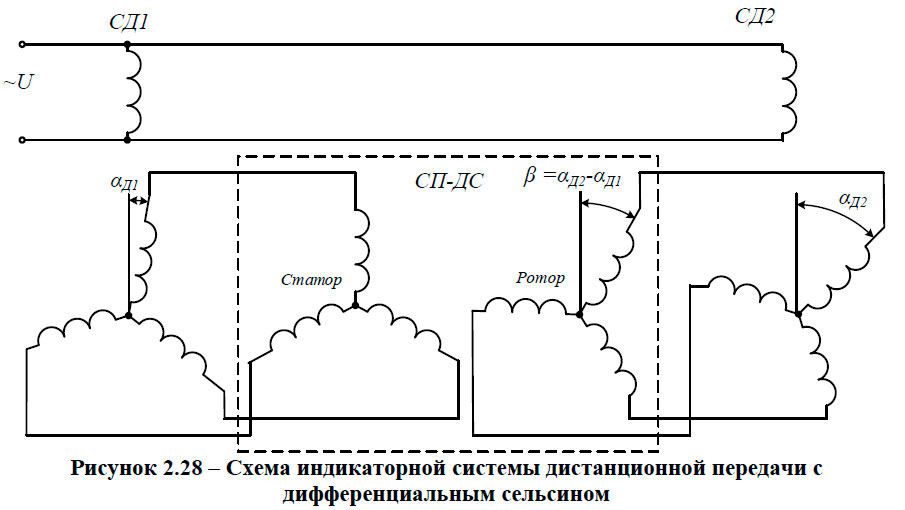
В результате взаимодействия МДС FДС1 и FДС2 на роторе дифференциального сельсина возникает вращающий момент МД. Поэтому, если растормозить ротор дифференциального сельсина СП–ДС, то под действием момента МД ротор повернется на угол β так, чтобы векторы МДС FДС1 и FДС2 совпали по направлению и создали в магнитной системе дифференциального сельсина результирующий магнитный поток. Если роторы датчиков СД1 и СД2 повернуть на углы αД1 и αД2 в разные стороны, то ротором дифференциального сельсина будет воспроизведен угол поворота, равный разности заданных углов. Особенностью работы индикаторных систем с дифференциальными сельсинами является протекание токов в цепях синхронизации после отработки дифференциальным сельсином заданных углов, т.е. в согласованном состоянии.
Литература
Элементы и функциональные устройства судовой автоматики - Авдеев Б.А. [2018]