Датчики частоты вращения служат для определения числа оборотов вала двигателя за единицу времени и применяются в регулируемых приводных системах. По принципу действия датчики подразделяются на механические, гидравлические и электрические (тахогенераторы). Первые два типа сегодня применяются крайне редко и в основном используются на старых судах.
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
где ω – частота вращения ротора в оборотах в минуту, UВых – выходное напряжение тахогенератора, k – коэффициент преобразования.
Требования, предъявляемые к тахогенераторам:
1. Линейность выходной характеристики.
2. Большая крутизна выходной характеристики (чувствительность, при небольшом напряжении частоты вращения выходное напряжение изменяется очень сильно).
3. Малая амплитудная погрешность.
4. Малая фазовая погрешность (для тахогенераторов переменного тока).
5. Минимальная пульсация выходного напряжения (для тахогенераторов постоянного тока).
6. Малый момент инерции ротора.
7. Минимальная масса и габариты.
8. Выходное напряжение должно принимать одинаковые абсолютные значения при вращении вала тахогенератора в разных направлениях (по или против часовой стрелке) на одинаковых частотах, т.е. быть симметричными.
9. Напряжение на выходе тахогенератора при ω=0 должно принимать минимальное значение. Это напряжение принято называть остаточным.
10. Пульсации выходного напряжения должны быть минимальными и не создавать помех, вызываемых электромагнитными процессами во время его работы.
11. Выходная мощность должна соответствовать подключаемой к нему нагрузке (прибора, устройства, схемы и т. п.), или быть достаточной для нормальной работы.
Механические датчики частоты вращения
Механический датчик центробежного типа (рисунок 2.64) состоит из вращающихся грузов 4, укрепленных на траверсе 6, приводимой во вращение от вала машины. На вращающиеся грузы действует центробежная сила Fцб, которая через рычаги 5 и муфту 3 сжимает пружину 2. Выходным сигналом датчика является величина перемещения муфты. Винтом 1 регулируется степень предварительного сжатия пружины 2 и зависимость закона перемещения муфты от частоты вращения.
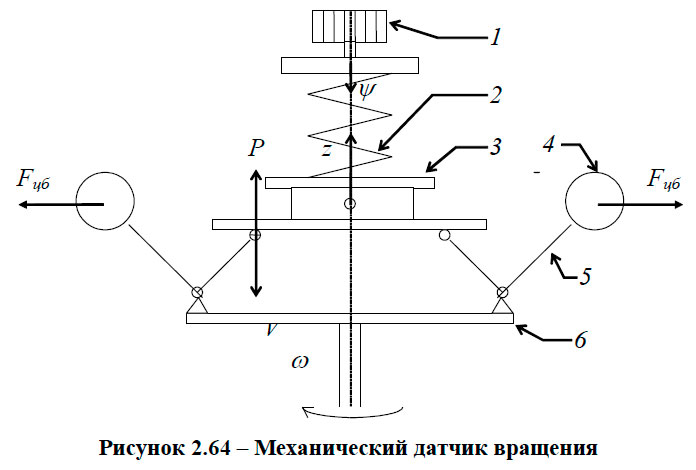
В точке касания рычага 5 и муфты 3 действуют поддерживающая P и восстанавливающая V силы. Поддерживающая сила Р прямо пропорциональна центробежной Fцб и зависит от величины z перемещения муфты
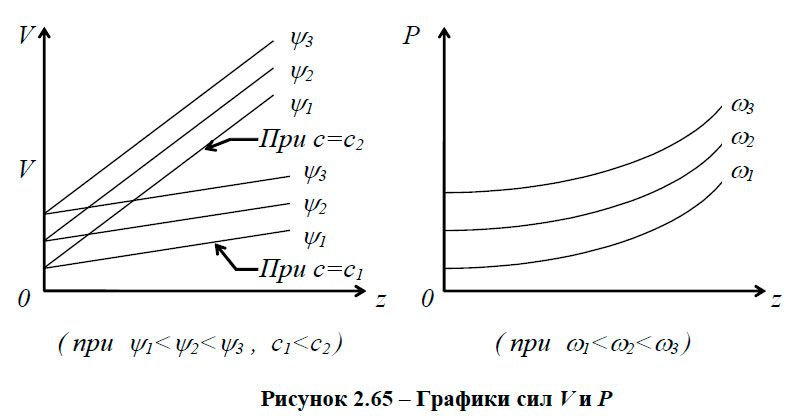
Графики сил V и Р приведены на рисунке 2.65.
Преимущества:
- простота конструкции.
Недостатки:
- невысокая точность из-за трения между элементами;
- необходимость дополнительного преобразователя перемещения для подачи сигнала в систему управления;
- чувствительность к вибрациям и крену судна;
- нелинейная выходная характеристика.
Гидравлические датчики частоты вращения
Гидравлический датчик частоты вращения приведён на рисунке 2.66. Масляный насос 1 приводится во вращение машиной с частотой ω. В напорной магистрали, содержащей цилиндр 3 и дроссель 2, создаётся давление, которое перемещает поршень цилиндра. Это перемещение является выходным сигналом датчика.
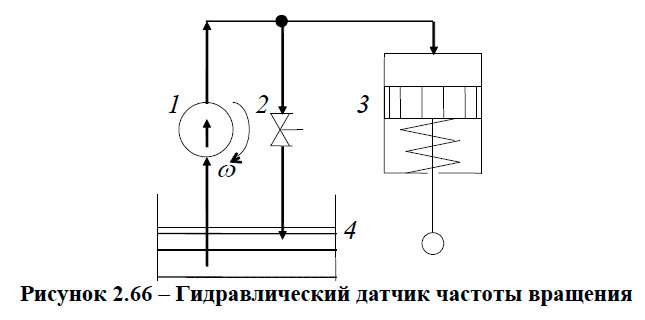
Уровень давления р в цилиндре пропорционален частоте вращения насоса. Коэффициент пропорциональности между ω и p регулируется степенью открытия дросселя 3, через который в ванну 4 возвращается масло.
Тахогенераторы постоянного тока
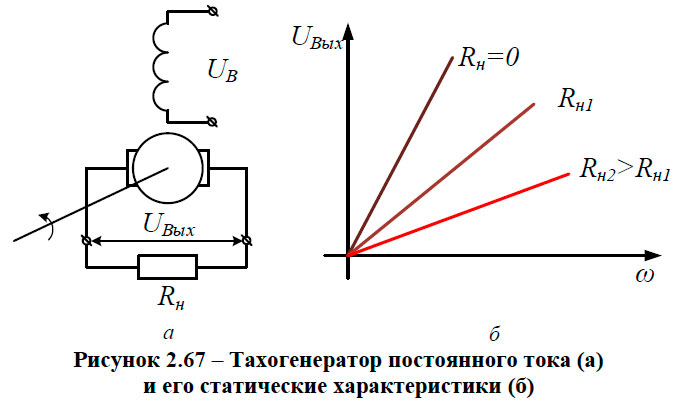
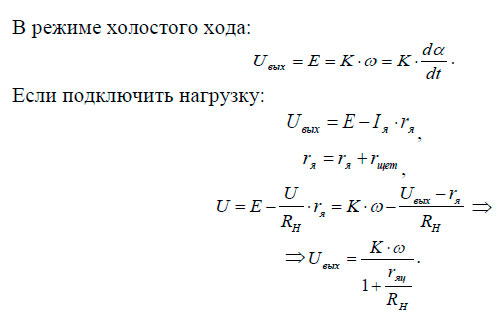
Принцип действие тахогенераторы постоянного тока аналогично работе генератора. Тахогенератор на рисунке 2.67 а представляет собой маломощный генератор постоянного тока, на обмотку возбуждения ОВ которого подаётся постоянное напряжение Uов, а с обмотки якоря, приводимой во вращение машиной, снимается напряжение UВых величиной
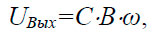
где С – постоянный коэффициент; В – индукция магнитного поля ОВ, пропорциональная Uов.
Достоинства:
- меньшие габаритные размеры и масса (в 2-3 раза) при большей выходной мощности, чем у асинхронных;
- отсутствие фазовой погрешности;
- возможно возбуждение постоянными магнитами, что позволяет обойтись без источника питания для цепи возбуждения.
Недостатки:
- сложность конструкции;
- высокая стоимость;
- наличие скользящего контакта между щетками и коллектором, что приводит к снижению надежности тахогенератора и к нестабильности выходной характеристики;
- наличие зоны нечувствительности;
- пульсации выходного напряжения;
- не могут измерять очень медленное вращение из-за того, что амплитуда генерируемого сигнал становится очень малой;
- напряжение на выходе зависит от сопротивления измеряемой цепи;
- помехи радиоприему, для подавления которых в некоторых случаях приходится применять специальные меры.
Асинхронные тахогенераторы
Асинхронный тахогенератор – двухфазный асинхронный двигатель (микроэлектрическая машина), представлена на рисунке 2.68 а.
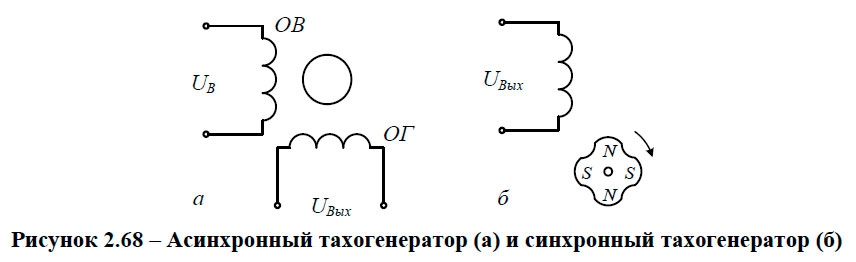
Полый ротор выполняется из высокоомных материалов (латунь, константан). За счет применения этих материалов достигается высокая температурная стабильность. Обмотка возбуждения создает пульсирующий магнитный поток, направленный по продленной оси машины (продленная ось машины совпадает с осью полюсов обмоток на статоре сердечника). При неподвижном роторе магнитный поток возбуждения индуцирует в роторе трансформаторную ЭДС. Сам полый ротор можно считать состоящим из отдельных элементов, проводников, которые замкнуты на торцах. Так как они замкнуты под действием трансформаторной ЭДС, протекают токи, направление которых совпадает с поперечной осью машины.
Эти токи создают магнитный поток, направленный навстречу потоку возбуждения. В результате результирующий поток направлен по продольной оси. В выходной обмотке (генераторной) ЭДС равно 0 (при неподвижном роторе), т. к. магнитный поток скользит по обмотке. При вращении ротора элементарные проводники ротора пересекают магнитные силовые линии потока возбуждения. Напряжение индуцируется в проводниках ЭДС – вращения. Под действием этой ЭДС в элементарном проводнике будут течь токи, создающие магнитное поле, направленное по поперечной оси. Этот поток пропорционален частоте вращения. Поток по поперечной оси сцепляется с выходной обмоткой и в ней индуцируется выходная ЭДС, пропорциональная скорости вращения. Выходное напряжение будет зависеть от сопротивления нагрузки:
Линейность характеристики зависит от полного сопротивления нагрузки. При высоких скоростях характеристика нелинейная. Для уменьшения скоростных погрешностей ТГ выбирают с такой синхронной скоростью, при которой значение относительной частоты вращения ротора составляет s=0,3.
Преимущества:
- большая надежность;
- отсутствие скользящих контактов;
- малоинерционность, обусловленная малым моментом инерции ротора;
- наличие малого момента сопротивления (трения в подшипниках и тормозящего электромагнитного) вследствие отсутствия радиальных и аксиальных сил, действующих на ротор;
- устойчивость к вибрациям.
- неплохая стабильность характеристик.
Недостатки:
- нелинейность выходной характеристики;
- наличие фазовой погрешности;
- наличие нулевого (остаточного) напряжения;
- малая выходная мощность, что приводит к необходимости увеличения габаритных размеров (асинхронный тахогенератор в 2...4 раза больше тахогенератора постоянного тока с такой же
- выходной мощностью);
- низкий cosφ;
- напряжение на выходе зависит от сопротивления измеряемой цепи;
- не могут измерять очень медленное вращение из-за того, что амплитуда генерируемого сигнал становится очень малой;
- большие масса–габаритные показатели.
Синхронные тахогенераторы переменного тока
Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток (см. рисунок 2.68 б). Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Этот тип тахогенератора можно охарактеризовать переменной частотой, это представляет затруднение для применения в схемах стандартного предназначения, переменного тока. Он отличается нечувствительностью к изменению направления вращения вала двигателя. В синхронных тахогенераторах используется большое количество пар полюсов. По этой причине, синхронные тахогенераторы применяются для электроприводов с небольшой скоростью вращения вала. Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами – частотным и амплитудным.
Частотный способ определения скорости вращения
Частотный метод для СТГ является самым точным, т. к. на частоту выходного сигнала не оказывают влияния такие факторы как, изменения температуры, величина зазора между статором и ротором, уменьшение магнитного потока, вызванное старением магнитов и т.д.
Но, к сожалению, при определении скорости вращения частотным способом требуется время для определения частоты выходного сигнала UВых путём накопления импульсов, что не даёт возможности получать мгновенно информацию об изменениях скорости.
После определения частоты fВых выходного сигнала UВых, скорость вращения ротора вычисляют по формуле:
где fВых – частота сигнала UВых на выходе тахогенератора, Гц; p – число пар полюсов ротора тахогенератора.
Для более точного определения частоты вращения ротора необходимо большее количество времени, в течение которого частота может изменяться. А изменение частоты во время накопления импульсов для её определения вносит погрешность в измерения. Это плохо сказывается на динамичности системы управления в целом, т.к. её схема управления, в таких случаях, более медленно компенсирует уменьшение или увеличение скорости вращения. Чтобы как-то уменьшить вышеуказанный недостаток, используют синхронные тахогенераторы с большим количеством полюсов. Это даёт возможность сократить время для определения выходной частоты, что в свою очередь позволяет сократить время реакции схемы управления.
Частоту выходного сигнала можно определять по следующей формуле:
где N – число накопленных импульсов; Т – длина каждого периода.
Амплитудный способ определения скорости вращения
Амплитудный способ выгодно отличается от частотного простотой схемы управления, но не очень точен из-за: температурных колебаний; зазоров между статором и ротором; старения магнитов ротора, влияющее на величину магнитного потока; частотной модуляции, оказывающей воздействие на реактивные элементы электрической цепи. Как и в других типах тахогенераторов, при увеличении скорости вращения ротора возрастает и генерируемая в обмотке статора ЭДС. Для «считывания» значений этой ЭДС обычно используют выпрямитель (одно- или двухполупериодный) и НЧ фильтр, назначение которого сглаживать пульсации.
Преимущества:
- отсутствие посторонний источник питания для обмотки возбуждения;
- возможность точного определения частоты вращения частотным способом;
- остальные преимущества такие же, как и у асинхронного тахогенератора.
Недостатки:
- напряжение на выходе зависит от сопротивления измеряемой цепи;
- не симметрия воздушного зазора, она способствует возникновению низкочастотных пульсаций;
- магнитный поток сопровождается зубцовыми пульсациями;
- параметры машины зависят от температурных изменений;
- определение скорости вращения частотным способом требуется время для определения частоты выходного сигнала;
- не могут измерять очень медленное вращение из-за того, что амплитуда генерируемого сигнал становится очень малой;
- невозможность определения направления вращения.
Условия и меры, применяемые при эксплуатации синхронных тахогенераторов для компенсации погрешностей аналогичны мерам, используемым для тахогенераторов постоянного тока. Пульсации выпрямленного напряжения выравниваются за счет изготовления конструкции ротора с полюсами специального профиля, благодаря этому получается необходимая ЭДС. Снижение зубцовых пульсаций происходит за счет использования сглаживающего фильтра.
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором – датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
Литература
Элементы и функциональные устройства судовой автоматики - Авдеев Б.А. [2018]