
Основное назначение шлюпочных лебедок—быстрый и безопасный спуск и подъем шлюпок. Спускаются шлюпки под действием собственного веса на тормозе, подъем производится на приводе.
Для обслуживания шлюпок весом до 510 кг применяются обычно ручные лебедки. Для подъема более тяжелых шлюпок применяются электро- и пневмоприводные лебедки с запасным ручным приводом.
По конструктивному исполнению шлюпочные лебедки подразделяются на одно- и двухбарабанные, одинарные и сдвоенные. Одинарные лебедки обслуживают одну шлюпку, сдвоенные — две шлюпки. Передачи в лебедках зубчатые цилиндрические и червячные.
Кинематическая схема отечественной электроприводной лебедки ЛЭРЗ/1 приведена на рис. 85.
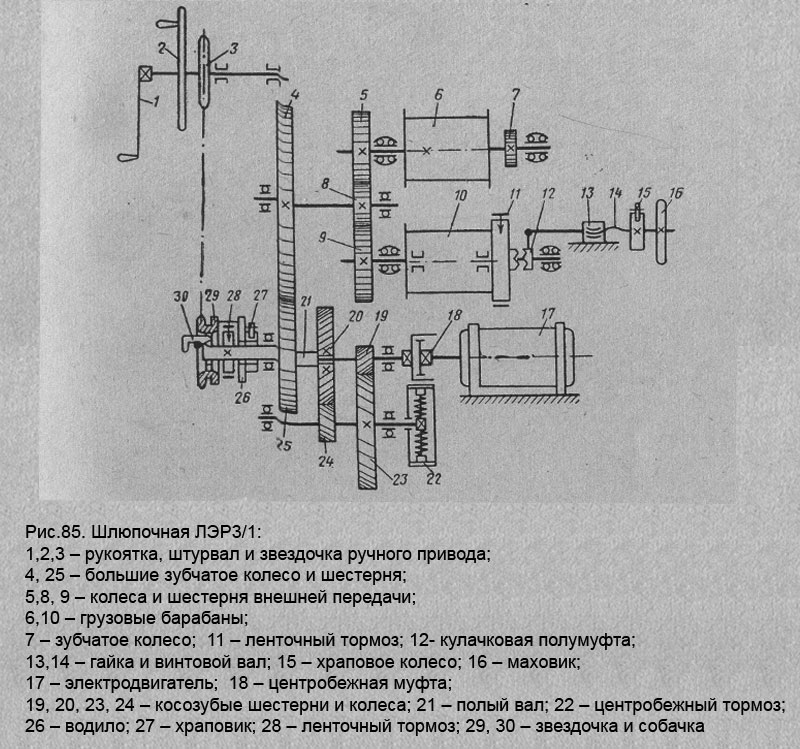
Лебедка предназначена для обслуживания одной шлюпки и оборудована двумя грузовыми барабанами, расположенными параллельно друг над другом. Верхний барабан сидит на валу жестко, нижний — свободно. Нижний барабан оборудован ленточным тормозом и вводится в действие при помощи кулачковой муфты. Ввод или вывод подвижной кулачковой полумуфты ручной от маховика. Механизм перемещения полумуфты сблокирован с ленточным тормозом, что дает тормозу возможность растормаживаться только при включенном барабане во время подъема шлюпки.
При работе лебедки на электродвигателе ручной запасной привод отключается и вращение электродвигателя передается механизму лебедки через центробежную муфту. На промежуточном валу лебедки смонтирован центробежный тормоз, который включается в действие при числе оборотов вала 1400 в минуту и замедляет скорость спуска шлюпки.
При работе от ручного привода электродвигатель отключается и вводится в действие ручной привод вращением ручного штурвала. Этот же штурвал предназначен и для вывода ручного привода. Вращение рукоятки привода передается грузовым барабанам через цепную передачу и прямозубые шестерни.
Обратное самопроизвольное вращение лебедки при подъеме шлюпки исключено. для этого применена безопасная рукоятка на конце полого вала. В состав рукоятки входят неподвижно насаженный на полый вал тормозной шкив с ленточным тормозом и свободно насаженный диск со звездочкой. Звездочка соединяется с торцом полого вала при помощи собачки. На ступице тормозного шкива сидит свободно водило с храповиком.
При подъеме шлюпки собачка выводится из зацепления с полым валом и вращение передается от тормозного шкива водилу и храповику, имеющему две собачки через сжатую пружину и тормозной ленты и рычаг. Храповый механизм вращается свободно в сторону подъема, но при внезапной перемене вращения вала застопоривается и предохраняет шлюпку от быстрого обратного опускания.
Спуск шлюпки осуществляется под действием собственного веса на тормозе. Для этого ручной штурвал поворачивается и передает вращение звездочке безопасной рукоятки через цепную передачу. Звездочка нажимает на ролик рычага выступом своего диска, рычаг поворачивается, сжимает пружину и растормаживает ленточный тормоз. Для затормаживания вращения ручной штурвал поворачивается в обратную сторону.
Траповые лебедки
Спуск и подъем забортных трапов производится на судах при помощи различных устройств. Наиболее употребительны индивидуальные устройства — ручные и электроприводные траповые лебедки. Последние оборудуются запасным ручным приводом. Электродвигатель вращает грузовой барабан через червячную или цилиндрическую зубчатую передачу и оборудован дисковым электротормозом. Растормаживанием вала двигателя вручную производится опускание трапа под действием собственного веса. Каждый трап снабжается собственной лебедкой.
Из отечественных электроприводных драповых лебедок находят широкое применение лебедки ЛЭ-50, ЛЭ-32 и др. Грузоподъемность лебедок соответственно 500 и 1500 кг при мощности двигателей 1,5 и 2,0 квт. Устройство лебедки ЛЭ-50 подобно в основном устройству грузовой лебедки ЛЭ44, приведенной на рис. 81.