
Буксирные лебедки предназначены для буксировки воза — сигары леса, судов, плашкоутов и т. п. и устанавливаются на буксирных судах, ледоколах и судах ледокольного типа.
Современные буксирные лебедки — автоматические, электро- или гидроприводные. Пароприводные лебедки применяются редко.
Схема устройства отечественной электроприводной буксирной лебедки приведена на рис. 84.
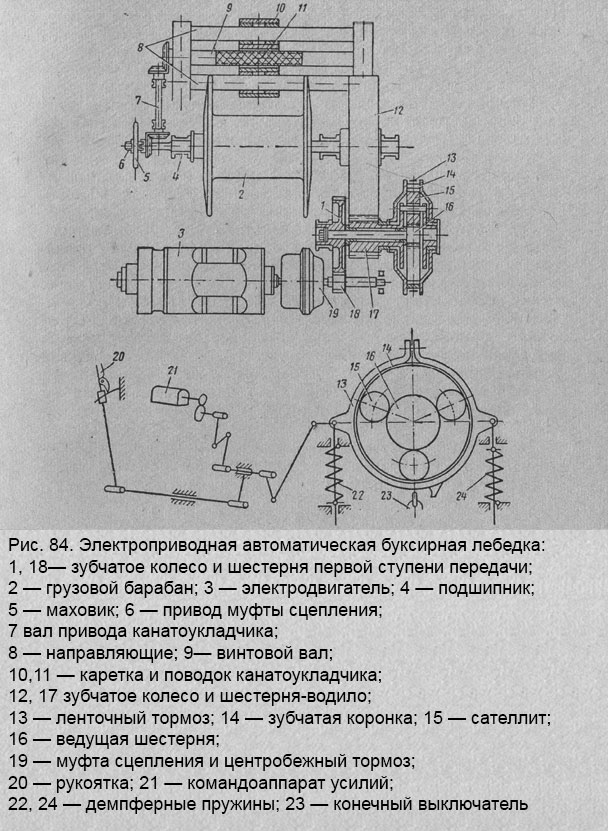
Грузовой барабан лебедки имеет диаметр 550 мм, длину 800 мм и реборды диаметром 1200 мм. Конец буксирного троса проходит через отверстие в реборде и закрепляется на ней при помощи простого замка, позволяющего тросу отдаться легко в аварийных случаях (гибель и быстрое затопление буксирного груза, и т. п.).
Лебедка оборудована электродвигателем, электрическим тормозом и ручным приводом для наматывания и сматывания троса. Канат укладывается на барабан и сматывается равномерно при помощи канатоукладчика. Передача вращения грузовому барабану производится через трехступенчатую цилиндрическую прямозубую передачу с общим передаточным числом 135. Зубчатые передачи лебедки заключены в кожух и смазываются непрерывно маслом, залитым в картер. Остальные трущиеся части лебедки смазываются периодически густой смазкой.
Электродвигатель соединяется с валом шестерни первой ступени передачи зубчатой муфтой. Совместно с муфтой смонтирован центробежный дисковый тормоз.
Буксировка в тихую погоду и при спокойном состоянии моря осуществляется при отключенном электродвигателе и зажатом ленточном тормозе. Канатоукладчик выполняет роль кнехта.
Буксировка с включенным электродвигателем производится на ручном или автоматическом управлении. Для этого лебедка оборудована специальным переключающим устройством на пульте управления. При буксировке ленточный тормоз лебедки зажимается с определенным усилием, которое и определяет величину натяжения буксирного троса. Лебедка испытывает постоянные динамические усилия со стороны воза (удары волн о него и т. п.), поэтому необходимо гасить эти усилия, чтобы не привести к повреждениям деталей лебедки. Гашение усилий производится в процессе вытравливания части буксирного троса и сматывании его с барабана. Вытравливание троса происходит потому, что величина динамической нагрузки совместно с сопротивлением воды движению воза преодолевает силу затяжки ленточного тормоза, зубчатая коронка проворачивается в тормозе и барабан получает возможность поворачиваться, обеспечивая вытравливание троса. После прекращения действия динамической нагрузки вытравленный участок троса наматывается назад на барабан ручным или автоматическим включением электродвигателя.
Для обеспечения автоматического управления лебедка оборудована взвешивающим устройством с командоаппаратом усилий и командоаппаратом пути с соответствующей электроаппаратурой.
Схема взвешивающего устройства приведена на нижней части рис. 84. Основу взвешивающего устройства составляет ленточный тормоз с демпферными пружинами. Пружины насажены на вертикальные стержни, прикрепленные к проушинам тормозной ленты. Лента обхватывает зубчатую коронку свободно и затягивается вручную. Величина затяжки тормоза контролируется по показаниям указательной стрелки. Таким образом, как во время затяжки, так и в процессе буксировки воза указательная стрелка постоянно показывает величину натяжения буксирного воза, как бы взвешивая его, откуда и возникло название взвешиваю¬щего устройства. На тормозной ленте укреплен в нижней части выступ предельного выключателя. От левой проушины ленты отходит рычаговая передача на командоаппарат усилий. Предел задаваемой величины затяжки ленточного тормоза 9—14 т.
При автоматическом управлении лебедкой вся система автоматики вводится в действие. Угол отвода контактов командоаппарата усилий производится при помощи установочной рукоятки вручную. Угол поворота вала автомата соответствует определенному натяжению троса, при котором срабатывает система автоматики. Установкой командоаппарата пути задается допускаемая длина вытравливания троса. Максимальная контролируемая длина составляет 50 м. Вал командоаппарата пути связан с грузовым валом и поэтому контроль за вытравливаемым тросом простой.
Во время буксировки электродвигатель отключен и заторможен, ленточный тормоз зажат с заданным усилием. Если динамическое усилие ненамного превысит натяжение тормоза, вал повернется немного и вытравит трос. Через третью и вторую ступени передачи и сателлиты зубчатая коронка повернется на некоторый небольшой угол и повернет ленточный тормоз. Демпферные пружины воспримут нагрузку и сожмутся. После прекращения действия нагрузки пружины расширятся и заставят ленту тормоза вместе с зубчатой коронкой вернуться в исходное положение. Коронка передаст вращение грузовому барабану через сателлиты и шестерни. Вытравленный небольшой участок буксирного троса выберется назад на барабан.
Если сила динамического воздействия значительно превысит заданное натяжение, коронка вместе с тормозом повернется на больший угол и вал командоаппарата усилий повернется на заданный угол воздействием рычажной передачи. Контакты командоаппарата замкнутся, и на двигатель будет подан слабый пусковой ток силой 1 а. Одновременно растормаживается электротормоз и двигатель развивает очень малый вращающий момент, позволяющий буксирному тросу все еще сматываться с барабана.
Сматывание троса будет происходить до заданного предела. Как только длина вытравленного участка троса достигнет заданного предела, командоаппарат пути включит дополнительные контакты и к электродвигателю начнет поступать ток с рабочими параметрами. Двигатель начнет вращаться и выбирать вытравленный участок троса. После выбирания установленного участка троса командоаппарат пути разомкнет контакты, питание электродвигателя обесточится и вал его затормозится. Взвешивающее устройство будет возвращено в исходное положение.
Таким образом, совместная работа взвешивающего устройства и командоаппаратов обеспечивает автоматическое управление лебедкой. Предусмотрены мероприятия по обеспечению безаварийной и безопасной работы лебедки.
Если тяговое усилие на тросе резко возрастет и достигнет верхнего предела 18—20 т, зубчатая коронка вместе с тормозом провернется на такой угол, при котором включатся контакты конечного выключателя. В электроцепь поступит импульс на электрическое торможение двигателя при отключенном механическом торможении его. При дальнейшем возрастании усилия или в другом случае при вытравливании троса более 50 м система автоматического управления лебедкой отключится, о чем известит предупредительная сигнализация.
В случае чрезмерного повышения скорости вращения двигателя при сматывании троса включится в действие центробежный тормоз. Включение тормоза происходит при 1400 об /мин, а при достижении 1800 об/мин тормоз создаст расчетный момент 25 кГм. При дальнейшем увеличении оборотов двигателя система автоматического управления отключится и сработает извещательная сигнализация.