СПИСОК СОКРАЩЕНИЙ
Общая характеристика электроприводов якорно-швартовных устройств
Электрический привод якорно-швартовных устройств предназначены для постановки судов на якоря и снятия их с якорей, выполнения швартовных операций и для обеспечения надежной стоянки судов на якорях или у причала.
Исходя из функционального назначения, электрический привод якорно-швартовных устройств можно объединить в следующие группы:
- швартовных лебедок;
- шпилей;
- якорных устройств;
- комбинированных устройств.
В зависимости от типа механического преобразователя (механической передачи) электрический привод якорно-швартовных устройств объединяются в две основные группы:
- электромеханические приводы;
- электрогидравлические приводы.
Электрический привод швартовных лебедок предназначены для работы со швартовными канатами: травления и выбирания канатов в широком диапазоне нагрузок (от холостого хода до номинальной) с заданными скоростями; удержания швартовного каната при необходимом натяжении.
Основными режимами работы подавляющего большинства электрических приводов швартовных лебедок являются автоматизированный и автоматический, которые обеспечиваются системой управления электропривода. Как правило, в автоматизированном режиме работы осуществляется травление и выбирание швартовных канатов в широком диапазоне нагрузок (от холостого хода до номинальной) с заданными скоростями, а в автоматическом – удержание швартовного каната при необходимом натяжении. Электрический привод швартовных лебедок имеют автоматические тормоза нормально заторможенного типа, которые должны обеспечивать тормозной момент без проскальзывания при тяговом усилии на барабане не менее 1,5 расчетного.
На рис. 5.1 представлена однобарабанная электрогидравлическая автоматическая швартовная лебедка ЛЭГША-6 отечественного производства. Два гидродвигателя 1 посредством двухступенчатого цилиндрического редуктора 3 вращают грузовой барабан 5 и турачку 2. При выполнении швартовных операций на судне управление лебедкой осуществляется с пульта управления.
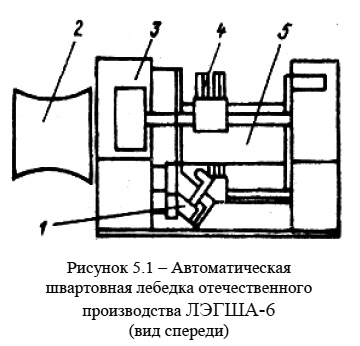
В режиме автоматизированного управления автоматическая швартовная лебедка работает от насосного агрегата. Гидропривод действует по замкнутому контуру: насос – гидродвигатель. В режиме автоматического управления лебедка работает от аккумуляторной станции по схеме: аккумулятор – гидродвигатель – пневмобак. Лебедка включает в себя два канатоукладчика 4.
Электрический привод шпилей, как и электрический привод швартовных лебедок, предназначены для работы со швартовными канатами (травления и выбирания) в широком диапазоне нагрузок с заданными скоростями.
Шпили имеют вертикальные барабаны, дающие возможность работать со стальными, растительными и синтетическими швартовными канатами любого горизонтального направления. Электрический привод шпилей являются, как правило, двухскоростными или трехскоростными. Электрический привод швартовных лебедок и шпилей имеют автоматические тормоза нормально заторможенного типа, которые должны обеспечивать тормозной момент без проскальзывания при тяговом усилии на барабане не менее 1,5 расчетного.
На рис. 5.2 представлен двухпалубный электромеханический (редукторный) швартовный шпиль.
")
Вертикально расположенный электрический двигатель 3 смонтирован на корпусе редуктора 4. Такое расположение позволяет использовать цилиндрические редукторы и повысить КПД передачи. Промежуточный баллер шпиля соединен с баллером 2 швартовного барабана 1 и вертикальным валом редуктора с помощью фланцевых муфт.
Электрический привод якорных устройств предназначены для постановки судов на якоря и снятия их с якорей посредством якорных цепей.
Основным элементом любого якорного устройства является цепной барабан-звездочка, посредством которого осуществляется механическая связь якорной цепи с механическим преобразователем.
Достаточно широкое распространение получили комбинированные электрические приводы (якорные устройства со швартовными барабанами (брашпили), якорно-швартовные шпили, лебедки с якорной приставкой и др.).
Брашпили, предназначенные для раздельной и совместной работы с якорными цепями правого и левого борта, используются в качестве ЭП (электрический привод) якорных устройств во многих случаях. Отдача якорей осуществляется, как правило, без включения электрического привода под действием сил тяжести, обусловленных массами якорей и якорных цепей. Выбирание якорных цепей и якорей осуществляется посредством цепных звездочек и сопровождается, как правило, работой электрического привода на различных скоростях.
На рис. 5.3 показан отечественный редукторный брашпиль Б3.
 брашпиль Б3 (вид с обратной стороны)")
Горизонтально расположенный многоскоростной электрический двигатель 6 смонтирован на корпусе редуктора брашпиля. Две турачки 1, предназначенные для работы со швартовными тросами при выполнении в основном швартовных операций, и две цепные барабан-звездочки 3, предназначенные для травления и выбирания якорных цепей, установлены на грузовых валах. Турачки 1 механически жестко связаны с валами, а звездочки 3 – нет. Таким образом, при работе электрического двигателя 6 турачки 1 вращаются постоянно, а звездочки 3 могут вращаться или находиться в неподвижном состоянии. Для вращения цепных барабан-звездочек 3 они механически соединяются с грузовыми валами кулачковыми муфтами сцепления посредством приводов 7. Скорость отдачи якорей при отключенном Электрический двигатель регулируется посредством ручных приводов ленточных тормозов 5 механическими ленточными тормозами 2, которыми снабжены цепные барабан-звездочки 3. Плавное включение звездочек 3 и смягчение динамических нагрузок обеспечиваются использованием фрикционных муфт. Брашпиль Б3 имеет указатели длины 4.
Якорно-швартовный электромеханический шпиль (рис. 5.4) включает в себя скобу-отбойник 1, кулачковую муфту 2, пустотелый вал 4, маховик включения звездочки 5, зубчатую передачу 6, палубный стакан 7, червячную передачу 10 и электрический двигатель 11. Постановка судов на якоря и снятие их с якорей якорными цепями осуществляются посредством цепной звездочки 8. При работе со швартовными тросами используется турачка 3. Шпиль снабжен ленточным тормозом 9.
")
На рис. 5.5 представлены общие основные составляющие якорного устройства с редукторной механической передачей.
")
На рис. 5.5: 1 – якорная цепь; 2 – носовой клюз судна; 3 – цепная барабан-звездочка; 4 – редукторное передаточное устройство; 5 – исполнительный ЭД; 6 –палубный клюз; 7 – цепной ящик; 8 – концевая скоба; Г – точка на грунте (конечная точка касания якорной цепью грунта); К – точка носового клюза судна.
При стоянке судна на якоре (рис. 5.5) якорная цепь 1 состоит из четырех составляющих: якорная цепь 1.1, лежащая на грунте; свободно провисающая часть якорной цепи 1.2; часть якорной цепи 1.3, свисающая в цепной ящик; часть якорной цепи 1.4, уложенная в цепном ящике. Один конец всей якорной цепи соединен с якорем Я, а другой – с корпусом судна при помощи жвака- галса (от гол. zwak-hals – приспособление для крепления коренного конца якорной цепи к корпусу судна). Жвака-галс состоит из короткого отрезка якорной цепи, один конец которой с помощью специальной концевой скобы 8 крепится к цепному ящику 7, а другой – с помощью откидного гака (глаголь- гака) к якорной цепи 1.
Классификация электроприводов якорно-швартовных устройств
Общая классификация
- 1.1. По степени значимости на судах:
- – главные.
- 1.2. По уровню автоматизации:
- – автоматизированные (большинство электроприводов якорно-швартовных устройств);
- – автоматические (работа швартовных лебедок в автоматических режимах).
- 1.3. По степени управляемости:
- – следящие.
- 1.4. По числу рабочих скоростей:
- – многоскоростные (в большинстве).
- 2.1. По типу преобразователя:
- – дискретные (якорно-швартовные устройства с гидравлическими передачами, включающими магнитный пускатель и с механическими приводами, включающими, например, многоскоростные асинхронные двигатели и релейно-контакторные системы управления);
- – аналоговые (якорно-швартовные устройства, содержащие системы «генератор – двигатель» (система) и др.);
- – инверторные.
- 2.2. По технической реализации преобразователей:
- статические (гидравлические электрические приводы якорно-швартовных устройств с магнитным пускателем и механические электрические приводы, включающие, например, релейно-контакторные системы управления);
- электромеханические (электрические приводы якорно-швартовных устройств , включающие системы «генератор – двигатель» (система)и др.).
- 3.1. По принципам преобразования электрической энергии в механическую энергию:
- – электромашинные.
- 3.2. По роду тока:
- постоянного тока;
- переменного тока.
- 4.1. По способу распределения (передачи) механической энергии:
- – индивидуальные;
- – групповые;
- – взаимосвязанные.
Кроме широко используемых индивидуальных (одиночных) электрических приводов, в якорно-швартовных устройствах нашли применение групповые электрические приводы (например, в электрическом приводе брашпилей один электрический двигатель вращает цепную звездочку и турачку).
К взаимосвязанным электрические приводы относятся приводы брашпилей с двумя двигателями.
- 4.2. По типу передаточного устройства:
- редукторные;
- безредукторные электрические приводы, у которых движение рабочему (исполнительному) органу передается через передаточные устройства, не содержащие редукторы (гидравлические передачи).
- 4.3. По регулированию координат движения:
- – регулируемые.
- Электрические приводы якорно-швартовных устройств относятся к регулируемым приводам, включающим системы «генератор – двигатель» (система), системы с многоскоростными асинхронными двигателями и др. Регулирование рабочей скорости повышает эффективность работы якорно-швартовного устройства.
- 4.4. По виду движения:
- – поступательного (непрерывного).
- 4.5. По направлению движения:
- – реверсивного.
- 4.6. По наличию тормозных устройств (управляемых муфт):
- – с тормозными устройствами (муфтами) в большинстве случаев.
- 5. По виду механических характеристик механизма (устройства):
- – иные.
Специальная классификация
- 1. По расположению:
- – палубные.
- 2. По функциональному назначению:
- – для выполнения якорно-швартовных операций.
- 3. По степени ответственности:
- – ответственные (второй категории).
- 4. По режимам работы:
- – иного.
Режимы работы электрических приводов якорно-швартовных устройств различны и зависят от их функционального назначения. Например, при выполнении якорных операций время работы лежит в пределах от 4 до 30 мин. Число включений при этом достигает 40. За номинальный режим работы принимается кратковременный режим (S2) продолжительностью 30 мин при работе на основной скорости.
- 5. По расположению рабочей оси:
- – вертикальные (ЭП шпилей);
- – горизонтальные (ЭП брашпилей, швартовных лебедок).
Основные требования и рекомендации, предъявляемые к электроприводам якорно-швартовных устройств
На судах, как правило, устанавливается не менее двух приводов якорно-швартовных устройств.
Нормированная рабочая скорость. Мощность электрического двигателя якорного устройства должна обеспечивать непрерывное выбирание в течение 30 мин одной якорной цепи с якорем нормальной держащей силы со скоростью не менее 0,15 м/с при определенном тяговом усилии.
Скорость выбирания якорной цепи должна измеряться на длине двух смычек, начиная с момента, когда три смычки находятся в подвешенном состоянии.
При подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0,17 м/с. Рекомендуемая скорость втягивания якоря в клюз – не более 0,12 м/с.
Привод швартовного устройства должен обеспечивать непрерывное выбирание швартовного троса при номинальном тяговом усилии с номинальной скоростью в течение не менее 30 мин.
Скорость выбирания троса с помощью швартовной головки при номинальном тяговом усилии должна быть не более 0,30 м/с.
Достаточная перегрузочная способность. Для отрыва якоря от грунта привод якорного устройства должен обеспечивать в течение двух минут создание в цепи на одной звездочке тягового усилия не менее 1,5 расчетного без какого-либо требования к скорости.
При расчетном режиме работы швартовного устройства его привод должен обеспечивать в течение двух минут создание в тросе на первом слое навивки на барабане тягового усилия не менее 1,5 расчетного.
Двигатели переменного тока с короткозамкнутыми роторами электроприводных якорных и швартовных устройств после 30-минутной работы при номинальной нагрузке должны обеспечивать возможность стоянки под током при номинальном напряжении в течение 30 с для якорных устройств и 15 с для швартовных устройств. Для двигателей с переключаемыми полюсами это требование действительно при работе на полюсной обмотке, создающей наибольший пусковой момент.
Двигатели переменного тока с фазным ротором и постоянного тока должны выдерживать такой режим стоянки под током при моменте, в два раза превышающем номинальный. Напряжение питания при этом может быть ниже номинального. После режима стоянки под током превышение температуры должно быть не более 130% допустимого значения для примененной изоляции.
Наличие муфт и тормозов. Якорные устройства должны быть оборудованы разобщительными муфтами, установленными между звездочкой и ее приводным валом.
Якорные устройства с несамотормозящимися передачами должны иметь автоматические тормозные устройства, срабатывающие при исчезновении приводной энергии или выходе привода из строя.
Автоматические тормоза якорных устройств нормально заторможенного типа должны обеспечивать тормозной момент без проскальзывания, соответствующий усилию в цепи на звездочке не менее 1,3 расчетного, а швартовных устройств – при тяговом усилии на барабане не менее 1,5 расчетного усилия.
Питание. Должно осуществляться по отдельным фидерам от ГРЩ (главный распределительный щит). В отдельных случаях по согласованию с Регистром допускается подключение фидера питания якорного устройства к распределительному щиту (РЩ) грузовых лебедок или другому РЩ при условии их питания непосредственно от ГРЩ.
Защита.Должна быть предусмотрена защита ЭД от перегрузок при работе на ступенях скоростей, предназначенных только для швартовных операций.
Литература
Основы теории и эксплуатации судовых электроприводов. А. Ф. Бурков (2021)