
В качестве якорных механизмов используются брашпили (полубрашпили), якорные или якорно-швартовные шпили и якорно-швартовные лебедки.
Определяющим для выбора механизмов якорных устройств и расчета мощности является режим их работы при снятии судна с якоря, который условно можно разделить на следующие основные периоды: I - выбирание цепи, когда часть ее лежит на грунте; II - выбирание цепи, когда вся якорная цепь поднята с грунта; III - отрыв якоря от грунта; IV - выбирание цепи и свободно-висящего якоря после отрыва от грунта; V - втягивание якоря в клюз.
Основным элементом любого якорного механизма, работающего с цепью, является цепной кулачковый барабан-звездочка. Горизонтальное положение оси звездочки свойственно брашпилям, вертикальное - шпилям. У некоторых современных судов устанавливают якорно-швартовные лебедки. Лебедки устанавливают также при комбинированных канатах (для глубоководной стоянки).
По скорости выбирания цепи Vm, якорные механизмы делятся на две группы: с нормальной скоростью выбирания (0,17 м/с) и с повышенной скоростью выбирания (не менее 0,4 м/с). Якорные механизмы большинства морских транспортных судов относятся к первой группе. Якорные механизмы второй группы устанавливают на судах, где требуется быстрое снятие с якоря.
Брашпили предназначены для обслуживания цепей левого и правого бортов. Сравнительно недавно на крупнотоннажных судах стали применять раздельные полубрашпили (с одной звездочкой), смещенные к соответствующим бортам. Полубрашпили применяют также на катамаранах. Брашпили и полубрашпили, размещаясь на палубе, не занимают внутренних помещений, значительно упрощается обслуживание механизмов, осмотр и ремонт, сокращается количество обслуживающего персонала. Брашпили обеспечивают раздельную работу звездочек левого и правого бортов. Использование фрикционных муфт позволяет смягчать ударные нагрузки и обеспечить плавное включение звездочек. Отдача якоря производится за счет его собственного веса и веса цепи. Скорость при этом регулируется ленточным тормозом.
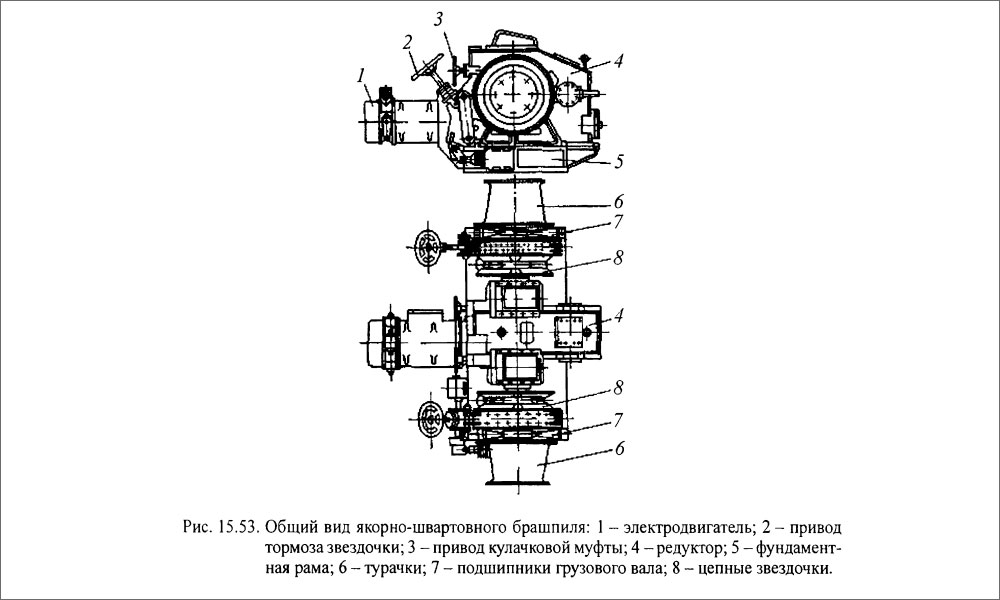
Брашпиль (рис. 15.53) состоит из двигателя, редуктора и размещенных на грузовом валу цепных звездочек и турачек. Звездочки сидят на валу свободно и при работе двигателя могут вращаться только тогда, когда они соединены с грузовым валом специальными кулачковыми муфтами. Турачки сидят на грузовом или промежуточном валу жестко и всегда вращаются при включенном двигателе. Каждая звездочка снабжена шкивом с ленточным тормозом. При увеличении размеров судов рационально спроектировать якорное устройство с брашпилями не удается.
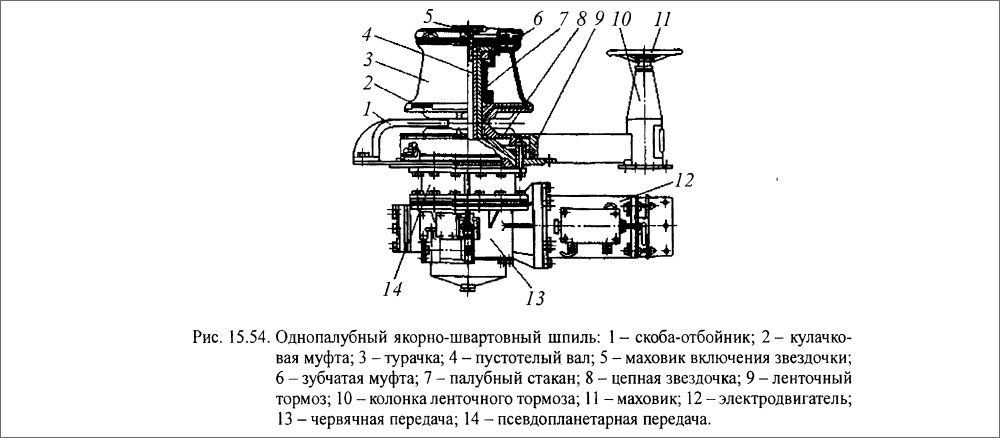
Шпиль обычно разделен на две части: звездочка и швартовный барабан располагаются на палубе, а редуктор и двигатель — в помещении под палубой. Вертикальная ось звездочки позволяет неограниченно варьировать в горизонтальной плоскости направление движения цепи. Наряду с освобождением верхней палубы это является существенным преимуществом шпиля над брашпилем. К преимуществам шпиля следует отнести также низкое положение центра тяжести, более простую конструкцию фундаментов, относительно малую массу. Часто якорный и швартовный механизмы объединяют в одном якорно-швартовном шпиле. На рис. 15.54 показан шпиль, двигатель которого закреплен под палубой.
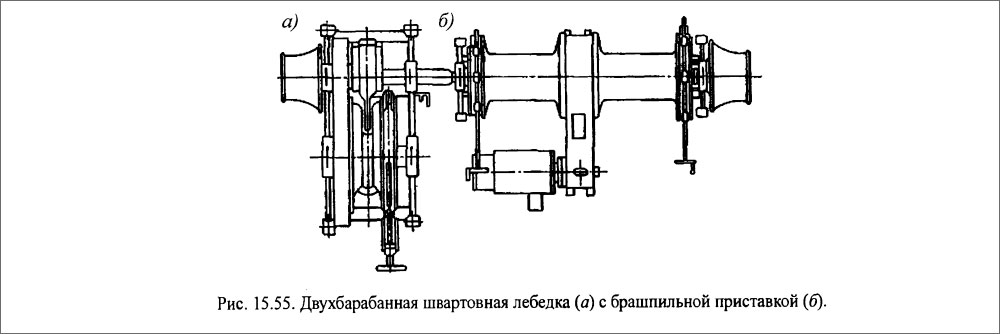
Якорно-швартовные лебедки, включающие в себя звездочку и швартовный барабан, находят все большее применение на морских транспортных судах (рис.15.55). Они отличаются высоким КПД, меньшей массой и безопасностью в работе. На плавучих кранах, землечерпательных снарядах, плавучих буровых установках и т. д. применяют якорно-швартовные лебедки, у которых на одной раме размещены цилиндрический швартовный барабан и якорная звездочка, имеющие общий грузовой вал и привод от одного двигателя.
На судах с глубоководным якорным устройством канат выбирают с помощью якорной глубоководной лебедки, имеющей цилиндрический барабан. Иногда на таких судах ставят два якорных механизма: брашпиль (шпиль) для стоянки на глубинах до 200 м и глубоководную якорную лебедку.
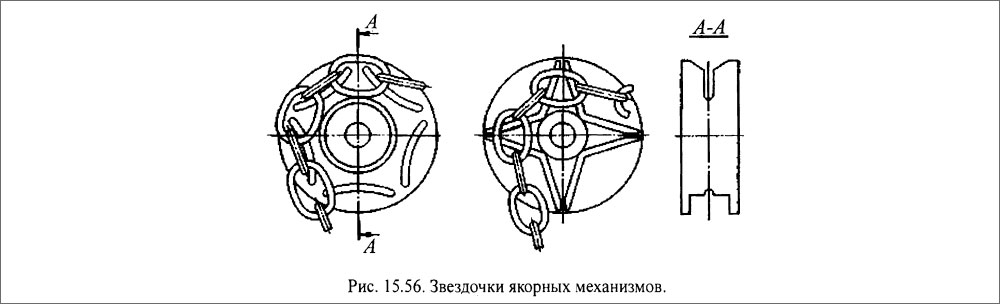
Звездочка (рис. 15.56) является одной из самых важных деталей любого якорного механизма. Надежное перемещение цепи достигается только тогда, когда не менее чем два выступа звездочки находятся в зацеплении с цепью. Достигается это увеличением угла охвата звездочки цепью и числа кулачков. У шпилей с большим углом охвата (до 180°) применяют звездочки с четырьмя кулачками, у брашпилей угол охвата составляет примерно 130° и число кулачков увеличивается до пяти-шести. Кулачки разделены канавкой, в которой размещены звенья, ориентированные перпендикулярно к ведомым звеньям. При вращении звездочки кулачки упираются в ведомые звенья и перемещают цепь.
По типу привода якорные механизмы делят на паровые, электрические и электрогидравлические.
Преимущества парового привода - способность выдерживать большие перегрузки и возможность работать во взрывоопасной зоне. К основным недостаткам этого привода относятся: сложность передачи пара и большие потери в паропроводах; необходимость предварительного прогрева всей системы, что значительно задерживает пуск механизмов, особенно в холодное время года; сложность регулирования скоростей; необходимость предусматривать специальные источники пара на судах с двигателями внутреннего сгорания. Из-за этих недостатков паровой привод применяется только на нефтеналивных судах.
Электрический привод обеспечивает постоянную готовность механизма к работе, высокое значение КПД, незначительные потери энергии при ее передаче. Если для якорных механизмов принят электрический привод, то следует выбрать, на каком токе он будет работать - на постоянном или переменном. Регулировка скорости в электродвигателях постоянного тока очень проста, и они могут работать в различных режимах с большой эффективностью. Однако электродвигатели переменного тока дешевле, надежнее в эксплуатации, лучше сочетаются с общесудовой системой электроснабжения.
Преимущества электродвигателей переменного тока позволяют с большой эффективностью применять комбинированный электрогидравлический привод, который обеспечивает хорошую регулировку скорости, воспринимает значительные и длительные перегрузки. Недостаток этого привода - большая стоимость.
Для якорных механизмов не требуется широкого диапазона регулировки скоростей. В связи с тем, что цепь при отдаче движется под действием собственного веса, отпадает необходимость холостого хода. Это позволяет отдать предпочтение электродвигателям переменного тока.