
Содержание
- Дроссельное регулирование
- Регулирование байпасом
- Коррекция диаметра рабочего колеса
- Регулирование скорости
- Сравнение методов регулирования
- Общий КПД насосной системы
- Регулирование по постоянному давлению
- Регулирование по постоянной температуре
- Регулирование по постоянному перепаду давления в циркуляционной системе
- Пропорциональное регулирование напора (косвенное)
- Преимущества регулирования скорости насосов
- Рабочие характеристики регулируемых насосов
- Регулируемые насосы в разных системах
- Основные функции и характеристики
- Компоненты преобразователя частоты
- Специальные условия, касающиеся преобразователей частоты
Регулирование рабочих параметров насоса
Методы регулирования
Преимущества насосов со встроенным преобразователем частоты
Преобразователь частоты
В данной статье речь пойдет о насосах, применяемых в промышленности, она рассчитана на инженеров и технических специалистов — тех, кто занимается конструированием и монтажом насосного оборудования, но также будет полезна и специалистам водного транспорта.
Источник статьи книга «Промышленное насосное оборудование», Компания ООО «Грундфос» / GRUNDFOS.
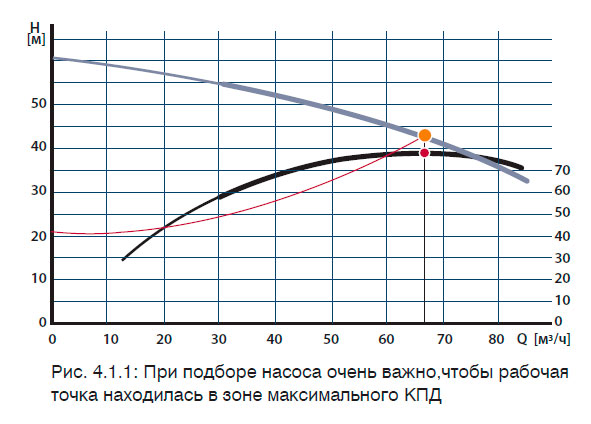
При подборе насоса очень важно, чтобы рабочая точка находилась в зоне максимального КПД. В противном случае потребляемая мощность может быть необоснованно завышенной, см. рис. 4.1.1.
Кроме того, иногда нет необходимости выбирать насос, соответствующий оптимальной рабочей точке, так как требования системы постоянно меня- ются или с течением времени меняется характеристика системы.
Поэтому лучшим вариантом может быть регулирование параметров насоса таким образом, чтобы они обеспечивали эксплутационные потребности системы.
Наиболее популярные методы изменения параметров насоса следующие:
- Дроссельное регулирование
- Регулирование байпасом
- Изменение диаметра рабочего колеса
- Регулирование скорости
Метод регулирования выбирается исходя из величины начальных инвестиций в оборудование и расходов на эксплуатацию. В течение срока службы системы можно опробовать все методы регулирования, кроме одного — коррекции диаметра рабочего колеса. Очень часто для системы используется переразме- ренный насос, мощность которого намного выше требуемой, и, следовательно, необходимо ограничить его производительность — прежде всего расход, и в некоторых случаях — максимальный напор.
Далее мы рассмотрим подробнее эти четыре метода.
Дроссельное регулирование
Задвижка устанавливается последовательно после насоса, позволяя регулировать рабочую точку. Она увеличивает сопротивление системы и снижает в ней расход. Без задвижки расход будет Q2. С задвижкой, установленной последовательно с насосом, расход понижается до значения Q1.
Задвижки могут использоваться для ограничения максимального расхода. Например, расход никогда не будет выше значения Q3, даже если характеристика системы будет абсолютно пологой, что означает отсутствие в системе какого-либо сопротивления. При регулировании параметров дроссельным методом насос будет обеспечивать более высокий напор, чем необходимо для данной системы.

При замене насоса с задвижкой на меньший насос, последний обеспечит желаемый расход Q1, но при более низком напоре и, следовательно, с меньшим энергопотреблением, см. рис.4.1.2.
Регулирование байпасом
Задвижка байпасного (перепускного) трубопровода устанавливается параллельно с насосом и используется для регулирования его параметров, см. рис. 4.1.3.
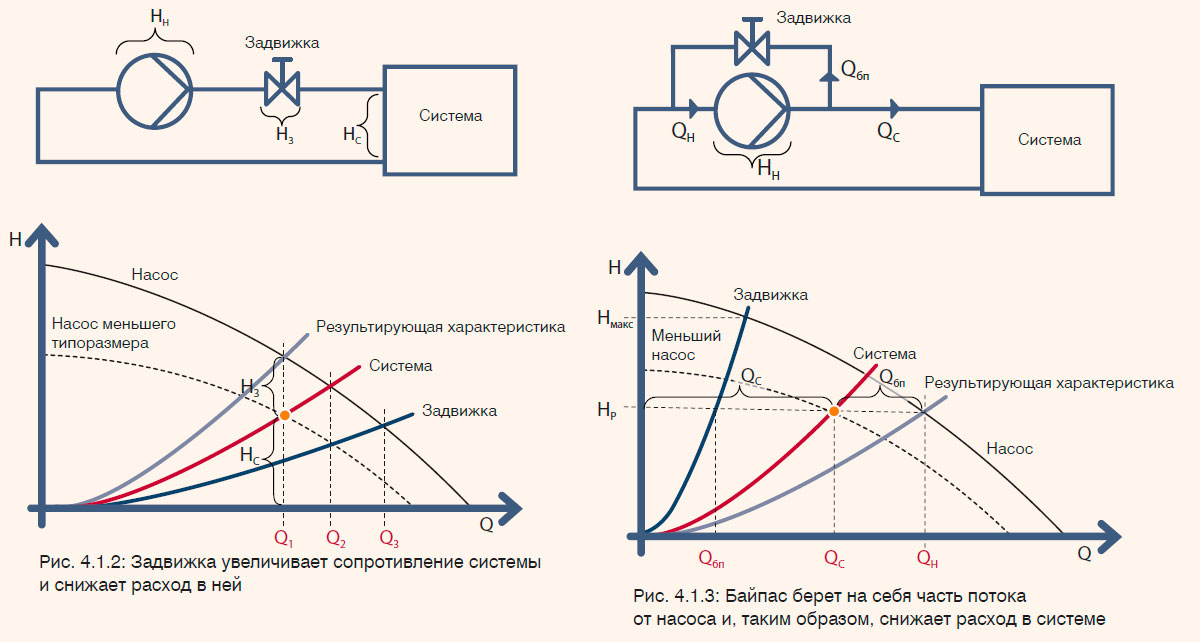
По сравнению с обычной задвижкой, устанавливаемой за насосом, байпасирование обеспечит определенный минимальный расход Qбп насоса, независимо от характеристик системы. Расход насоса QН равен сумме расхода системы QС и расхода через байпасный трубопровод Qбп.
Задвижка на байпасе будет обеспечивать максимально допустимый напор в системе Нмакс, см. рис. 4.1.3. Даже если требуемое значение расхода в системе равно нулю, насос никогда не будет работать на закрытую задвижку. Как и в случае с дроссельным регулированием, требуемое значение расхода системы QС может быть обеспечено меньшим насосом и без перепуска; в результате расход через насос будет ниже и, следовательно, потребление электроэнергии тоже снизится.
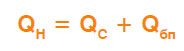
Коррекция диаметра рабочего колеса
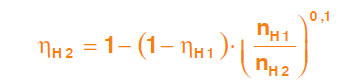
Очевидно, что уменьшение диаметра рабочего колеса не может быть произведено во время работы насоса. По сравнению с дроссельным и байпасным методами регулирования, которые можно проводить во время работы насоса, коррекция диаметра рабочего колеса должна быть выполнена до монтажа насоса или во время проведения ремонтных работ. Следующие формулы показывают связь между диаметром рабочего колеса и параметрами насоса:

Отметим, что эти формулы отражают работу идеального насоса. На практике, уменьшение диаметра рабочего колеса ведет к снижению эффективности работы насоса, т.е. к снижению его КПД. При незначительной коррекции диаметра DН2 > 0,8 • DН1, КПД уменьшится только на несколько процентов. Уровень снижения КПД зависит от типа насоса и его рабочей точки.
Как видно из формул, отношения изменения расхода и напора равны между собой и равны квадрату отношения диаметров рабочего колеса. Рабочие точки при этом располагаются на прямой, берущей свое начало в системе координат в точке (0, 0). Отношение потребляемых мощностей до и после коррекции равно отношению диаметров в четвертой степени.
Регулирование скорости
Последний способ регулирования — регулирование скорости. Регулирование скорости с помощью преобразователя частоты, вне всяких сомнений, является наиболее эффективным способом регулирования характеристик насоса.
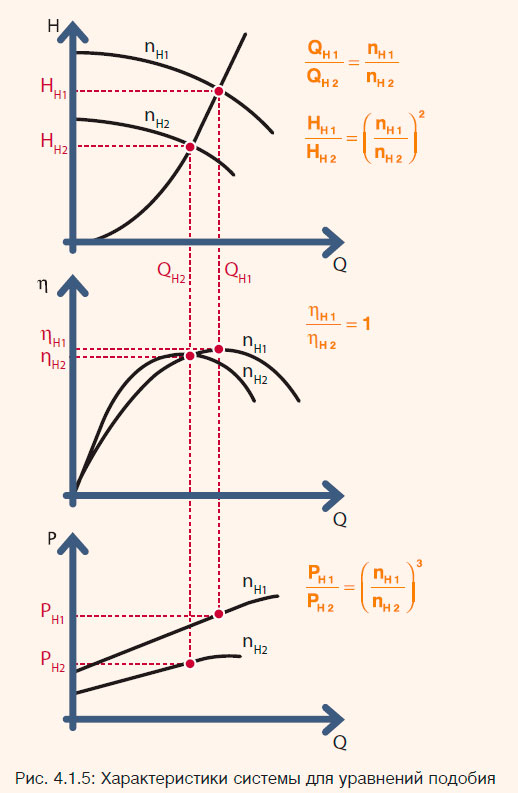
Следующие уравнения показывают влияние изменения скоростей центробежного насоса на его параметры:

Эти уравнения действительны при условии, что характеристика системы остается неизменной для nH1 и nH2 и образует параболу, выходящую из точки с координатами (0, 0) — см. раздел 3.1.1. Более того, предполагается, что и КПД насоса остается неизменным при двух скоростях.
Из формул на рис. 4.1.5 видно, что расход насоса (Q) прямо пропорционален его скорости вращения (n). Напор насоса (Н) прямо пропорционален квадрату скорости вращения, а мощность его прямо пропорциональна кубу скорости вращения. На практике снижение скорости вращения насоса приводит к уменьшению его КПД. КПД при снижении скорости (nH2) может быть определен по следующей формуле, которая имеет силу только при снижении скорости до 50% от максимальной:
И, наконец, если необходимо знать, сколько Вы сэкономите на электроэнергии при снижении скорости насоса, нужно учесть КПД преобразователя частоты и электродвигателя.
Сравнение методов регулирования
После того, как мы познакомились с четырьмя способами регулирования рабочих параметров насоса, рассмотрим характерные отличия каждого из них. Мы будем рассматривать насос и устройство регулирования как единое целое и сравним результирующую характеристику Q-H c характеристиками других методов.
Дроссельное регулирование
При дроссельном регулировании используется задвижка, соединенная последовательно с насосом, см. рис. 4.1.6(а). Такое соединение идентично новому насосу с другими рабочими характеристиками: при том же максимальном напоре мы получаем более низкий максимальный расход. Характеристика насоса HH1, характеристика задвижки и результирующая характеристика HH2 представлены на рис. 4.1.6(б).
Регулирование байпасом
При установке задвижки параллельно с насосом (рис. 4.1.7(а)), происходит изменение характеристики Q-H, и такое соединение идентично новому насосу с меньшим максимальным напором. Результирующая характеристика системы будет более походить на линейную функцию, чем на квадратную параболу, см. рис. 4.1.7(б).
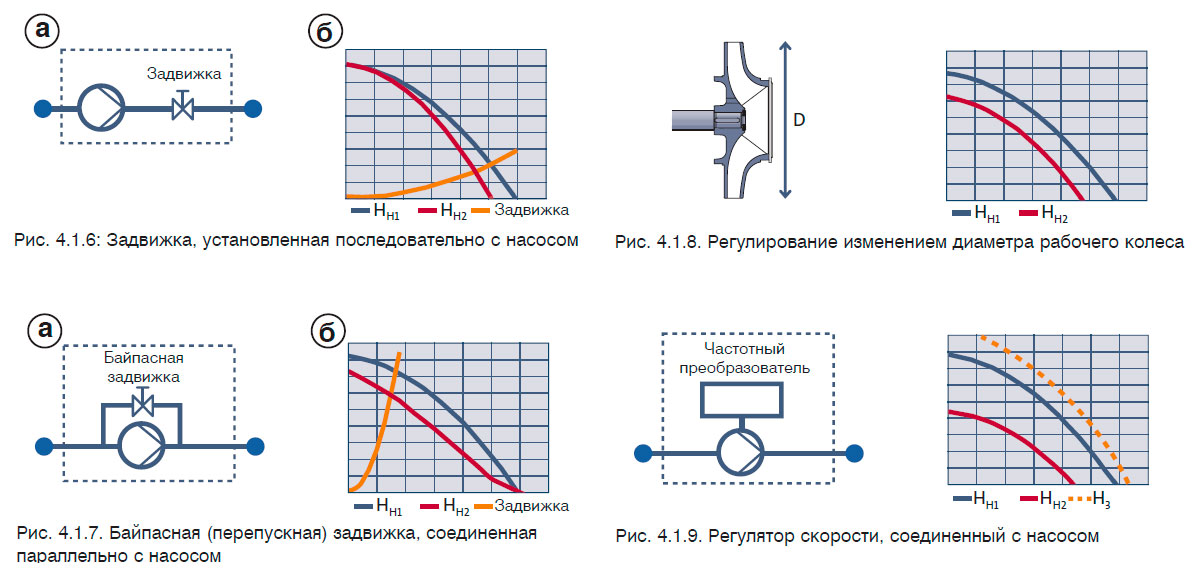
Коррекция диаметра рабочего колеса
При таком способе не происходит подключения к насосу каких-либо дополнительных устройств для изменения его рабочих параметров, но уменьшается диаметр его рабочего колеса. На рис. 4.1.8 представлена пониженная характеристика Q-H (HH2) и оригинальная характеристика (HH1).
Регулирование скорости
При регулировании скорости (рис. 4.1.9) происходит создание новой характеристики Q-H при сниженном напоре и расходе. При снижении скорости характе- ристика насоса становится более пологой, и напор понижается существеннее, чем расход.
В сравнении с другими методами, регулирование скорости позволяет расширить диапазон рабочих параметров насоса вверх от номинальной характеристики Q-H путем простого увеличения скорости, см. рис. 4.1.9 — характеристика НЗ. При таком методе регулирования необходимо учитывать мощность электродвигателя.
Общий КПД насосной системы
При дроссельном и байпасном регулировании имеют место гидравлические потери мощности в задвижках (Pпот = k · Q · H). Следовательно, происходит снижение КПД всей системы. Уменьшение размера рабочего колеса при соотношении DH2/DH1 > 0,8 не оказывает значительного влияния на КПД насоса и, следовательно, не снижает общий КПД системы.
При регулировании скорости насоса, пока скорость не упадет ниже 50% от номинальной, КПД регулируемых насосов изменяется в некотором ограниченном диапазоне. При дальнейшем снижении скорости КПД снизится на несколько процентов, что не окажет значительного влияния на экономические показатели системы.
Пример: Относительное потребление энергии при снижении расхода на 20%
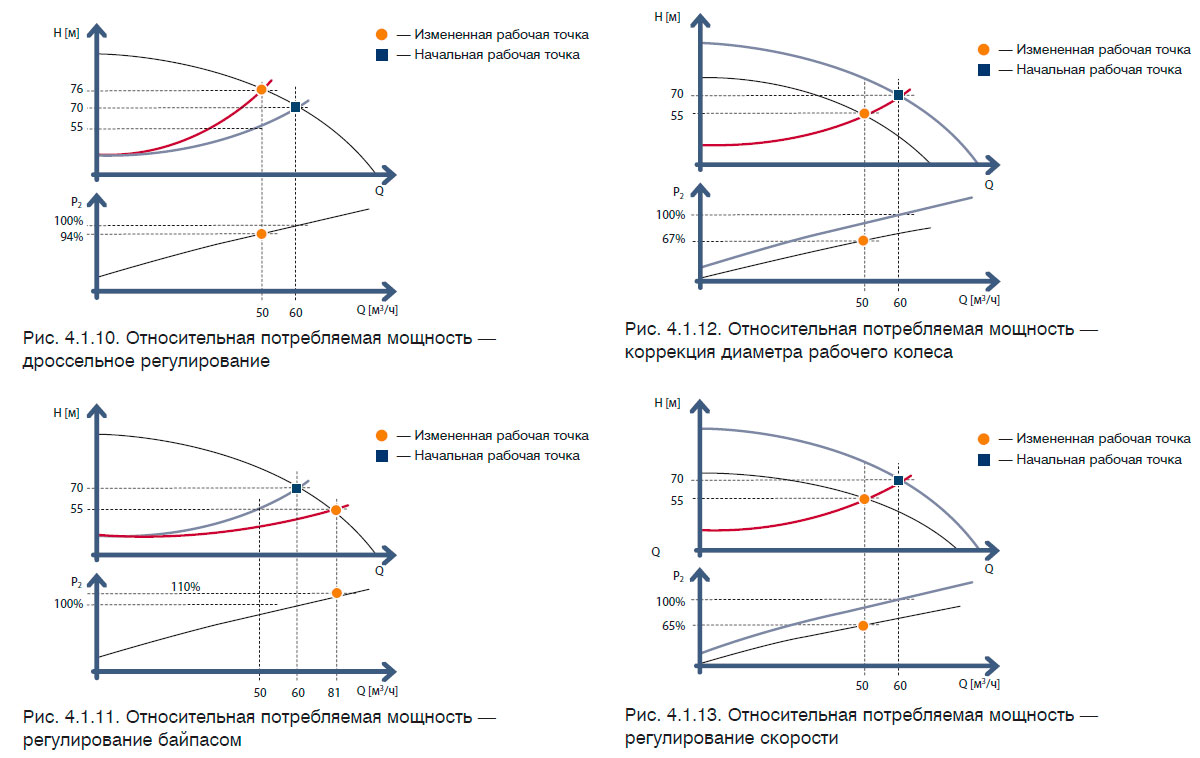
В системе расход должен быть снижен с 60 м3/ч до 50 м3/ч. Начальные параметры: Q = 60 м3/ч и Н = 70 м. Потребляемую мощность насоса примем за 100%. В зависимости от способа регулирования параметров снижение потребляемой мощности будет разным. Теперь давайте посмотрим, как потребляемая мощность зависит от способа регулирования параметров.
Реклама внутри статьи
Дроссельное регулирование
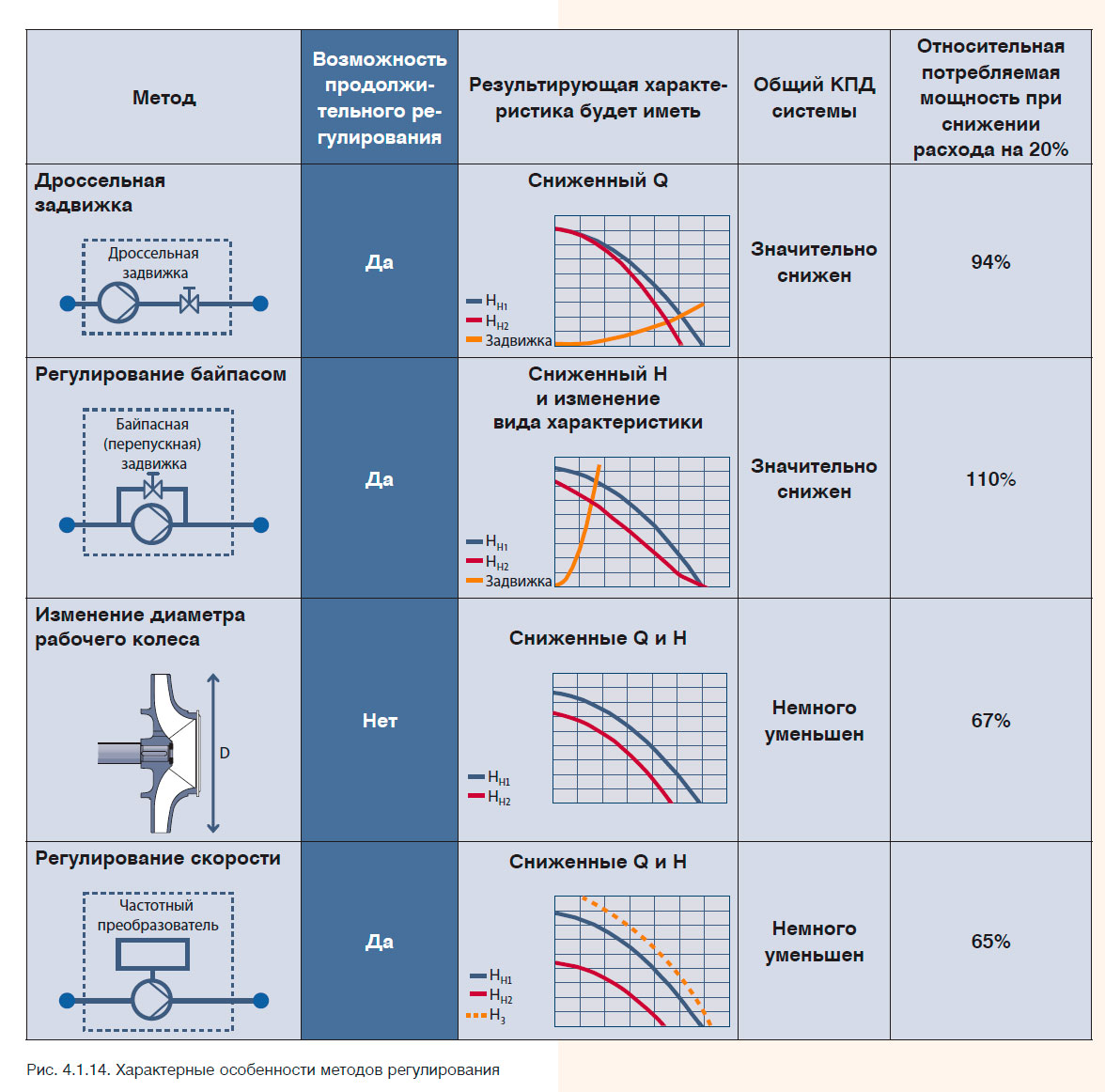
Потребляемая мощность снижается примерно до 94% при снижении расхода. Дроссельное регулирование ведет к увеличению напора, см. рис. 4.1.10. Для некоторых насосов потребляемая мощность имеет максимальное значение при значении расхода меньше максимального. В этом случае при дроссельном регулировании происходит увеличение потребляемой мощности.
Регулирование байпасом
Чтобы понизить расход в системе, необходимо уменьшить напор до 55 м с помощью клапана. Это может быть сделано путем увеличения расхода насоса. Как видно из рис. 4.1.11, расход через насос постепенно увеличивается до 81 м3/ч, что ведет к увеличению потребляемой мощности на 10% от первоначального значения. Увеличение потребляемой мощности зависит от типа насоса и его рабочей точки. В некоторых случаях увеличение мощности Р2 равно нулю и, что бывает очень редко, ее значение может быть даже снижено.
Коррекция диаметра рабочего колеса
При уменьшении диаметра рабочего колеса происходит снижение как расхода, так и напора. После снижения расхода на 20%, потребляемая мощность уменьшается примерно до 67% от ее первоначального значения, см. рис. 4.1.12.
Регулирование скорости
При регулировании скорости насоса происходит уменьшение расхода и напора насоса, см. рис. 4.1.13. Таким образом, снижается значение потребляемой мощности до 65% от ее первоначальной величины.
Если необходимо достичь максимума КПД при снижении расхода в системе, оптимальными методами регулирования будут изменение диаметра рабочего колеса и регулирование скорости. Если же насос должен работать в определенной неизмененной рабочей точке, лучшим решением будет метод изменения диаметра рабочего колеса. Если мы имеем дело с системой, где расход постоянно меняется, то лучшим вариантом будет регулирование скорости насоса.
Выводы
На рис. 4.1.14 представлен обзор методов регулирования, которые мы рассматривали в этом разделе. Каждый метод имеет свои достоинства и недостатки, которые должны всегда учитываться при выборе способа регулирования для системы.
Методы регулирования
Как было отмечено в предыдущем разделе, регулирование скорости насосов является наиболее эффективным способом управления параметрами насоса в системе. В этом разделе мы рассмотрим возможности объединения регулируемых насосов с PI-регуляторами и датчиками, замеряющими параметры системы, такие как давление, перепад давлений и температуру. Далее разные методы регулирования будут описаны на примерах.
Регулирование по постоянному давлению
Насос должен подавать воду из резервуара к различным потребителям.
Требования к расходу воды в данном случае будут постоянно меняться, следовательно, и характеристика системы будет меняться в соответствии с потребным расходом. Для экономии энергии и удобства потребителя необходимо, чтобы в системе было постоянное давление.
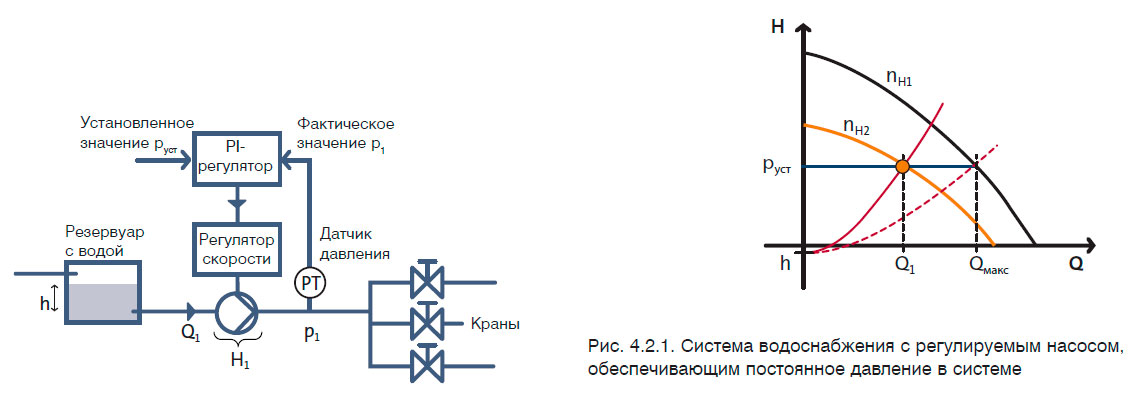
Как видно из рис. 4.2.1, решением в этом случае будет установка регулируемого насоса с PI-регулятором. PI-регулятор сравнивает установленное значение давления руст с фактическим значением р1, измеренным с помощью датчика давления РТ.
Если же фактическое давление выше, чем установленное значение, PI-регулятор снижает скорость насоса и, следовательно, его параметры, до тех пор, пока не установится равенство р1 = руст. На рис. 4.2.1 показано, что происходит, когда расход меняется с Qмакс до Q1. PI-регулятор изменяет скорость от значения nH1 до nH2, гарантируя при этом, что давление на выходе системы р1 = руст. Такая насосная система гарантирует постоянное давление в диапазоне расхода от 0 до Qмакс. Давление воды в точке водоразбора не зависит от ее уровня (h) в резервуаре. Если происходит изменение уровня воды (h), PI-регулятор изменяет скорость насоса таким образом, что давление р1 всегда соответствует установленному значению.
Регулирование по постоянной температуре
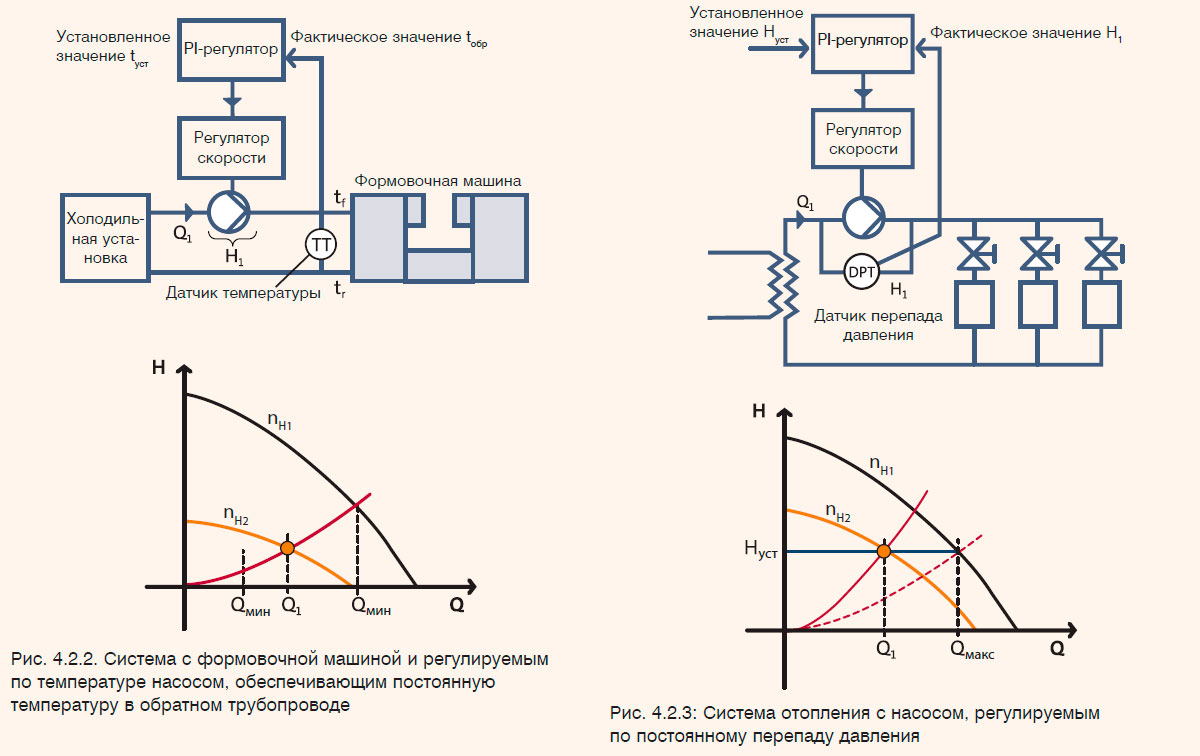
Изменение параметров системы с помощью регулирования скорости насоса используется во многих областях промышленности. На рис. 4.2.2 представлена система формовочной машины, которая должна непрерывно охлаждаться водой для получения продукта высокого качества.
Эта машина охлаждается водой с температурой 15°С, поступающей из холодильной установки. Чтобы данная формовочная машина работала качественно и охлаждалась достаточным образом, температура в обратном трубопроводе должна поддерживаться на постоянном уровне — tобр = 20°С. Для этого необходимо установить регулируемый по температуре насос, управляемый с помощью PI-регулятора. PI-регулятор сравнивает установленную температуру tуст с фактической температурой в обратном трубопроводе tобр, которая измеряется с помощью датчика температуры ТТ. Такая система имеет фиксированную характеристику, и, следовательно, рабочая точка насоса находится на характеристике между значениями расхода Qмин и Qмакс. Чем выше потери тепла в установке, тем больший расход холодной воды необходим для поддержания температуры воды в обратном трубопроводе на уровне 20°С.
Регулирование по постоянному перепаду давления в циркуляционной системе
Регулируемые насосы широко используются в циркуляционных (закрытых) системах, см. главу 3. Если система оснащена регулируемыми по перепаду давления циркуляционными насосами, она будет обладать определенными преимуществами, см. рис. 4.2.3.
На рисунке представлена система обогрева, в которую входит теплообменник, где вода в системе нагревается и доставляется к трем потребителям (например, радиаторам) с помощью регулируемого насоса. Регулировочный вентиль соединен с каждым радиатором последовательно для регулирования расхода через радиатор в зависимости от того, какая температура необходима потребителю. Насос регулируется по постоянному перепаду давления, измеряемому на насосе. Это означает, что система обеспечивает постоянный перепад давления на насосе в Q-диапазоне от 0 до Qмакс, изображенного горизонтальной линией на рис. 4.2.3.
Пропорциональное регулирование напора (косвенное)
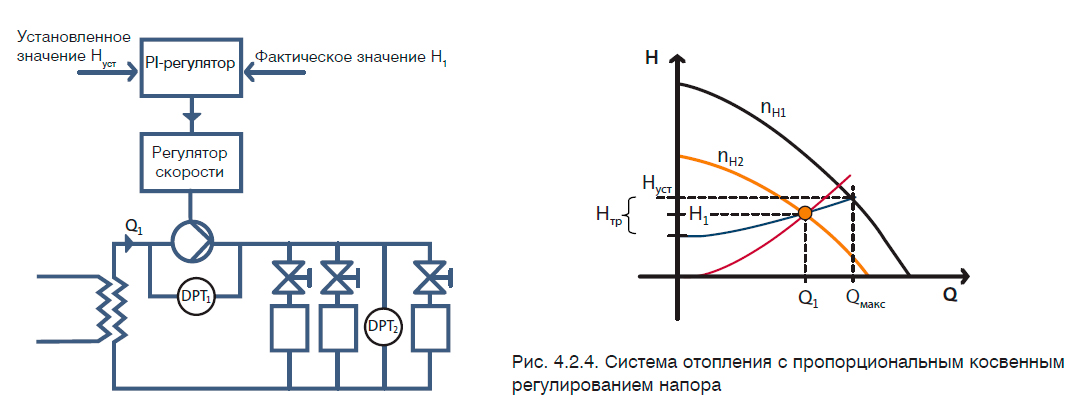
Основной функцией системы, представленной на рис. 4.2.4, является поддержание постоянного перепада давления на регулировочных вентилях, установленных, например, на радиаторах.
Как было сказано в главе 3, потери давления в системе прямо пропорциональны квадрату расхода. Лучшим способом регулирования насоса в такой системе будет способ, представленный на рисунке справа, где насос поддерживает постоянный перепад давления.
Когда потребный расход в системе достаточно мал, потери давления в трубопроводе, теплообменнике, фитингах и т. д. являются также небольшими, и при этом насос только компенсирует потери давления на регулировочном вентиле, Нуст – Нтр. Когда потребный расход увеличивается, потери давления увеличиваются в квадратичной зависимости и, следовательно, необходимо повысить давление насоса (рис. 4.2.4, голубая кривая).
Такая система может быть смонтирована двумя способами:
- Датчик перепада давления размещается на насосе — DPT1, см. рис. 4.2.4.
- Датчик перепада давления размещается на потребителях — DPT2, рис. 4.2.4.
Преимущество первого решения состоит в том, что насос, PI-регулятор, частотный преобразователь и датчик располагаются близко друг к другу, что позволяет упростить монтаж системы. При таком монтаже система регулирования и насос представляет собой единый узел, см. раздел 4.4. Чтобы включить эту систему и обеспечить ее работу, потребное значение перепада давления должно быть введено в систему управления насоса. Эти данные будут использоваться для расчета расхода, а также расчета, на сколько должно быть уменьшено установленное значение Нуст при данном расходе, чтобы гарантировать соответствие рабочих параметров насоса характеристике системы, представленной на рис. 4.2.4 голубым цветом.
Второй вариант монтажа, когда датчик расхода установлен на радиаторах, будет стоить дороже, т.к. при этом должна быть произведена укладка кабеля. Параметры этой системы приблизительно такие же, как и у первой. Датчик измеряет перепад давления на объекте потребления, и система автоматически меняет свои параметры с целью компенсации перепада давления в подающем трубопроводе и т.д.
Преимущества регулирования скорости насосов
Обычно насос, установленный в системе, не работает с максимальной производительностью 24 часа в сутки. Поэтому большим преимуществом будет автоматическое регулирование насоса в системе. Как мы видели в разделе 4.1, наилучшим способом регулирования рабочих параметров центробежного насоса является метод регулирования скорости. Этот метод регулирования в основном осуществляется с помощью преобразователя частоты.
Далее мы рассмотрим работу регулируемых насосов в открытых и закрытых системах. Но прежде чем мы вникнем в этот вопрос глубже, давайте проанализируем преимущества, которые дает нам регулирование скорости, и выгоды, получаемые при использовании регулируемых насосов, оснащенных преобразователем частоты.
Снижение энергопотребления
Регулируемые насосы используют только то количество энергии, которое необходимо для выполнения насосом определенной работы. По сравнению с другими методами, регулирование скорости обеспечивает максимальный КПД и, таким образом, более эффективное использование энергии.
Низкая стоимость жизненного цикла
Энергопотребление насоса является очень важным фактором, влияющим на стоимость жизненного цикла. Поэтому основным моментом будет снижение эксплуатационных затрат на систему. Эффективная эксплуатация ведет к более низкому энергопотреблению и, следовательно, к более низким эксплуатационным издержкам. В некоторых случаях использование регулируемых насосов позволяет снизить энергопотребление по сравнению с нерегулируемыми на 50%.
Защита окружающей среды
Использование насосов с эффективным энергопотреблением способствует меньшему загрязнению окружающей среды.
Высокий уровень комфорта
Использование регулируемых насосов в различных системах обеспечивает потребителю высокий уровень комфорта и удобство обслуживания: в системах водоснабжения автоматическое регулирование давления и плавный пуск насосов позволяет избежать гидравлического удара и шума; в циркуляционных системах регулируемые насосы поддерживают постоянный перепад давления, что позволяет минимизировать уровень шума в системе.
Уменьшение стоимости системы
Регулируемые насосы могут снижать потребность в регулирующих вентилях в системе и, соответственно, снижать ее стоимость.
Преимущества насосов со встроенным преобразователем частоты
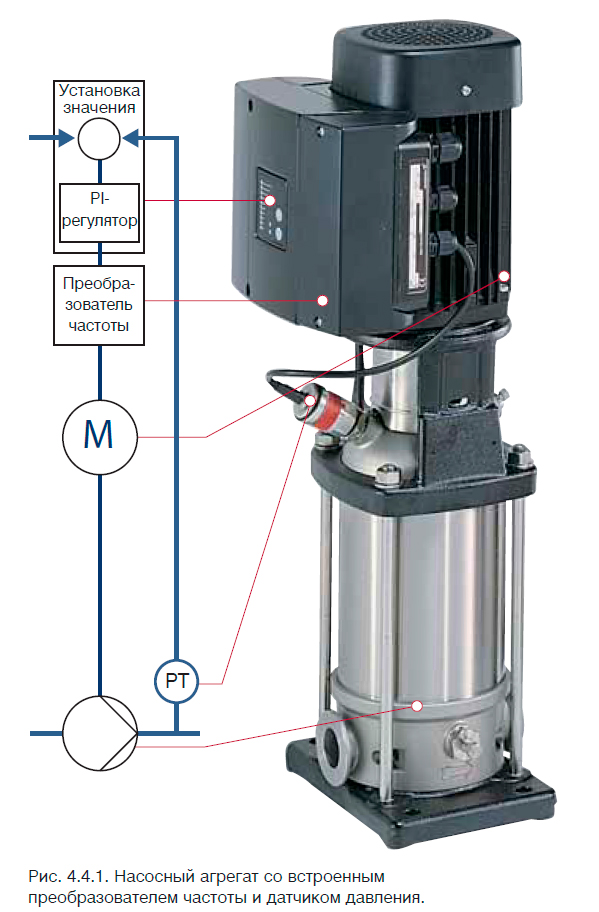
Применение насосов со встроенным преобразователем частоты является оптимальным решением во многих производственных отраслях. И основной причиной этого является объединение преимуществ регулируемого насоса с преимуществами, полученными от соединения в единый узел насоса, преоб- разователя частоты, PI-регулятора и иногда также датчика давления, см. рис. 4.4.1.
Насос со встроенным преобразователем частоты можно смело назвать системой, способной разрешать различные задачи, экономя при этом электроэнергию. Что касается взаимозаменяемости, то насосы со встроенным преобразователем частоты являются идеальными, так как их можно устанавливать вместо нерегулируемых насосов без дополнительных затрат. Для проведения таких работ необходимо оснастить насос встроенным преобразователем частоты, после чего он готов к эксплуатации. От монтажника требуется только установить заданное значение (давление), и система готова к работе.
Далее последует краткое описание преимуществ, которые дают насосы со встроенным преобразователем частоты.
Удобство монтажа
Насосы со встроенным преобразователем частоты так же удобны в монтаже, как и нерегулируемые насосы. Предварительные установки и регулировки насоса сделаны на заводе — изготовителе.
Оптимизация энергопотребления
Так как насос, электродвигатель и преобразователь частоты полностью совместимы друг с другом, работа такой системы значительно снижает энергопотребление.
Единый поставщик
Единый поставщик может предоставить насос, преобразователь частоты и датчик, что, естественно облегчает определение габаритов установки, ее подбор, заказ, а также сервисное обслуживание и ремонт.
Широкий диапазон рабочих параметров
Насосы со встроенным преобразователем частоты имеют очень широкий диапазон рабочих параметров, что позволяет им работать с большой эффективностью при различных условиях эксплуатации и отвечать большому количеству требований. Поэтому при замене нерегулируемых насосов, с узким рабочим диапазоном, Вам потребуется меньшее количество регулируемых насосов.
Рабочие характеристики регулируемых насосов
Теперь давайте посмотрим, что можно узнать из характеристик регулируемых насосов.
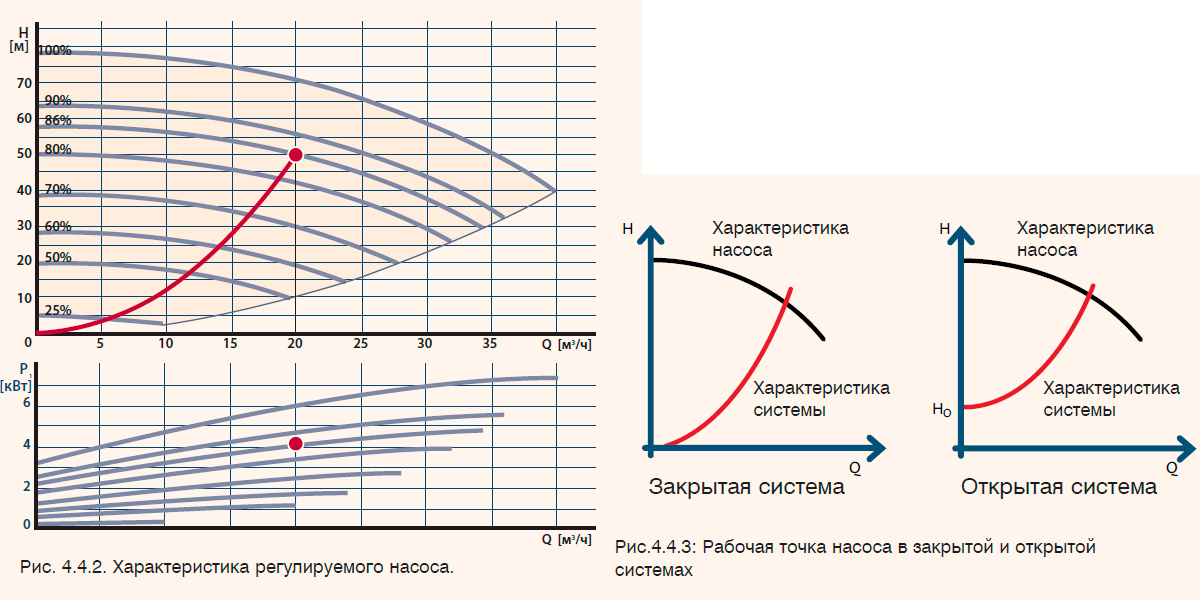
На рис. 4.4.2 показан пример характеристики регулируемого насоса. Верхний график представляет рабочую характеристику Q-H, нижний — соответствующую характеристику потребляемой мощности.
Как Вы видите, характеристики приведены для каждого 10% снижения скорости насоса, от 100% до 50%. Также изображена минимальная характеристика, соответствующая 25% от максимальной скорости. Вы можете указать определенную рабочую точку на характеристике Q-H и определить, какая скорость соответствует этой рабочей точке и какой будет потребляемая мощность Р1.
Регулируемые насосы в разных системах
Регулируемые насосы широко используются в различных системах. Изменение рабочих параметров насоса и, следовательно, потенциальная экономия энергии при этом зависят от типа системы.
Как было отмечено в главе 3, характеристика системы определяет значение требуемого напора насоса для транспортировки через систему определенного количества жидкости. На рис. 4.4.3 показана характеристика насоса и характеристика открытой и закрытой систем.
Регулируемые насосы в закрытых системах
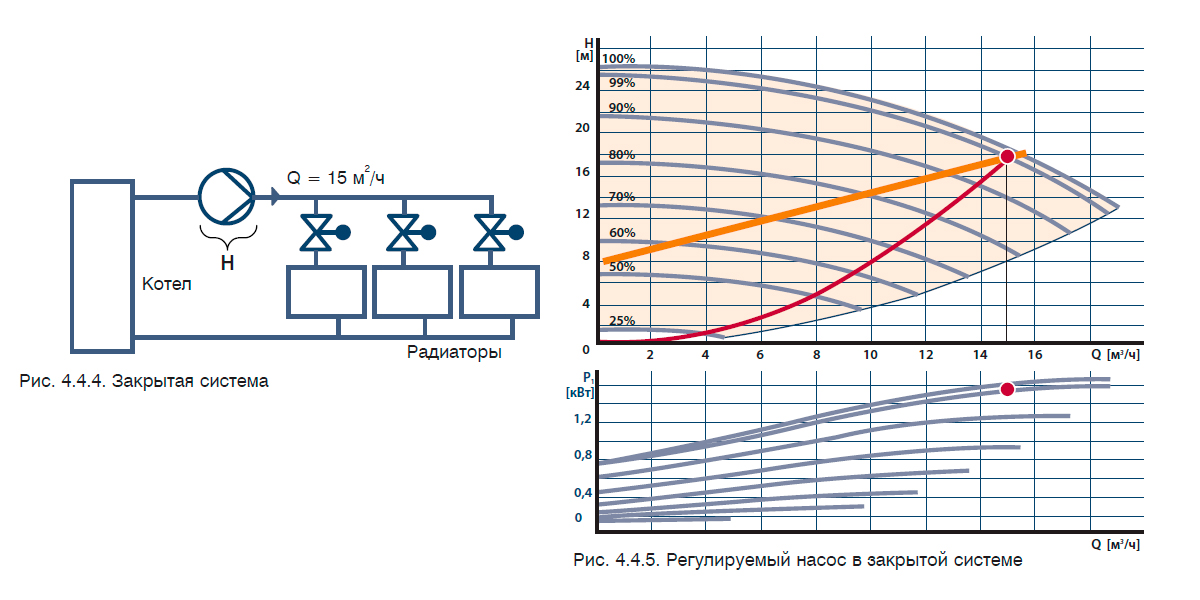
В закрытых системах, таких как системы отопления и кондиционирования, насос работает на преодоление потерь на трение в трубопроводе, клапанах, теплообменниках и т. д. В этом разделе мы представим пример работы регулируемого насоса в закрытой системе. Общие потери на трение при расходе 15 м3/ч составляют 16 м, см. рис. 4.4.4.
Характеристика системы берет начало в точке (0, 0) и изображена на рис. 4.4.5 красной линией. Регулировочные вентили в данной системе всегда нуждаются в определенном рабочем давлении, поэтому насос не может работать в соответствии с характеристикой системы. Поэтому некоторые регулируемые насосы предлагают функцию пропорционального регулирования давления, что будет гарантировать работу насоса в соответствии с показанной на рисунке оранжевой линией. Как видно из диаграммы на рис. 4.4.5, минимальные рабочие параметры соответствуют скорости примерно 57% от максимальной. В некоторых ситуациях (например, работа циркуляционной системы обогрева в ночное время) очень важно иметь возможность эксплуатации насоса по минимальной характеристике (25% от полной скорости).
Регулируемые насосы в открытых системах
Характеристика системы и рабочий диапазон насоса зависят от типа системы. На рис. 4.4.6 представлен насос, работающий в системе повышения давления/водоснабжения. Насос с расходом Q = 6,5 м3/ч, подает воду к водопроводному крану, который расположен на высоте h = 20 м относительно насоса. Давление на входе насоса рвсас составляет 1 бар, давление в кране ркр должно соответствовать 2 барам и потери на трение в системе ртр при полном расходе — 3 бара.
На рис. 4.4.7 изображена Q-H характеристика насоса, отвечающая приведенным выше требованиям. Можно просчитать требуемый напор при нулевом расходе (Н0), используя следующую формулу:
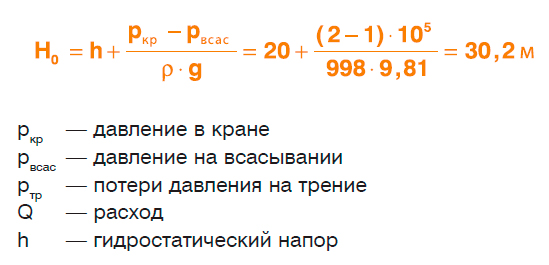
Чтобы просчитать максимальный напор при расходе (Q), равном 6,5 м3/ч, необходимо воспользоваться следующей формулой:

Чтобы обеспечить эти параметры от нулевого расхода до максимального Q = 6,5 м3/ч, насос работает в достаточно узком диапазоне скоростей — от 65% до 99% от максимальной скорости. В системах с небольшими потерями на трение диапазон изменения скорости будет еще меньше. При отсутствии потерь на трение, минимальная скорость будет составлять примерно 79% от полной скорости.
Из предыдущих двух примеров можно сделать следующий вывод: диапазон изменения скорости и, следовательно, потребляемой мощности в закрытых системах выше. Поэтому регулируемые насосы в закрытых системах дают большую экономию электроэнергии.
Преобразователь частоты
Как было упомянуто ранее, регулирование скорости насосов осуществляется с помощью преобразователя частоты. Рассмотрим подробнее принцип его работы и расскажем о мерах предосторожности при работе с этим устройством.
Основные функции и характеристики
Известно, что скорость асинхронного электродвигателя напрямую зависит от количества его полюсов (максимальной частоты вращения вала) и от частоты переменного тока в источнике питания. На скорость электродвигателя также оказывают влияние величина напряжения питания и нагрузка на вал двигателя, но не так значительно. Следовательно, изменение частоты напряжения питания является идеальным методом регулирования скорости асинхронного электродвигателя. Чтобы обеспечить правильное намагничивание электродвигателя, также необходимо изменить амплитуду напряжения.
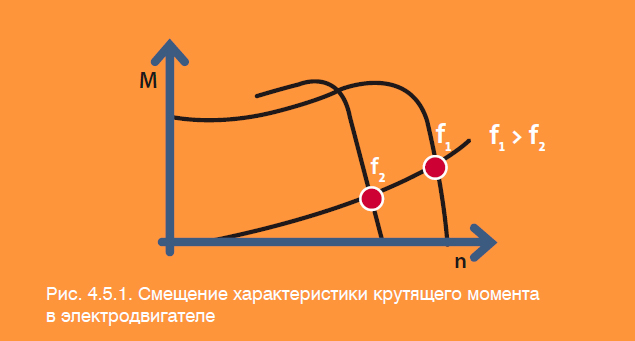
Регулирование частоты и напряжения приводит к смещению характеристики крутящего момента и, таким образом, к изменению скорости. На рис. 4.5.1 показана характеристика крутящего момента электродвигателя (М), как функция скорости вращения (n) при двух разных значениях частоты и напряжения. На этой же диаграмме изображена характеристика нагрузки насоса. Как видно из диаграммы, изменение скорости вращения происходит при изменении частоты и напряжения переменного тока в электродвигателе.
Преобразователь частоты изменяет частоту и напряжение электрического тока, поэтому мы можем сделать вывод, что основной задачей этого устройства является изменение величины напряжения и частоты переменного тока.
Компоненты преобразователя частоты
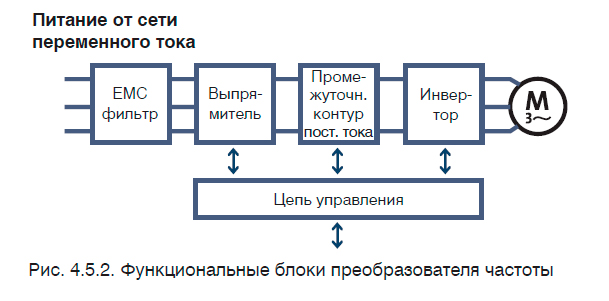
В принципе, все преобразователи частоты состоят из одних и тех же блоков. Как было упомянуто ранее, основной функцией преобразователя является пре- образование напряжения сети переменного тока в переменное напряжение (АС) с другой частотой и амплитудой.
В первую очередь, преобразователь частоты выпрямляет входящий переменный ток и напряжение, а затем аккумулирует энергию в промежуточном контуре, содержащем конденсатор. После этого напряжение постоянного тока (DC) преобразуется в новое АС напряжение, с другой частотой и амплитудой.
Частота переменного тока сети напрямую не оказывает влияния на выходную частоту и, следовательно, на скорость электродвигателя, так как в преобразователе частоты имеется промежуточный контур. При этом не имеет значения, какая частота в сети питания — 50 Гц или 60 Гц, потому что выпрямитель будет работать в обоих случаях. Кроме того, входная частота не будет влиять на выходную. Опираясь на вышеизложенные факты, использование преобразователя частоты с асинхронным электродвигателем дает следующие преимущества:
- Система может быть использована без каких-либо изменений при частоте 50 и 60 Гц.
- Частота на выходе преобразователя не зависит от частоты на его входе.
- Преобразователь частоты может обеспечивать частоты на выходе выше, чем в сети переменного тока, — это обеспечивает высокую степень синхронизации работы.
Как видно из рисунка 4.5.2, преобразователь частоты включает в себя еще три компонента: ЕМС фильтр, цепь управления и инвертор (обратный преобразователь).
ЕМС фильтр
Данный блок не является основной функциональной частью преобразователя частоты, и, в принципе, им можно было бы пренебречь в данном устройстве. Но чтобы обеспечить соответствие требованиям Директивы Европейского Союза по ЕМС (электромагнитной совместимости), а также местным требованиям, такой фильтр является необходимым элементом. ЕМС фильтр позволяет избежать проникновения обратно в сеть переменного тока недопустимых вредных электрических сигналов, которые способны негативно воздействовать на другие электронные приборы, подключенные к сети. Одновременно фильтр препятствует проникновению шумовых сигналов, произведенных другим оборудованием сети, в электронные компоненты преобразователя частоты.
Цепь управления
Цепь управления имеет две функции: она осуществляет контроль над преобразователем частоты и в то же время обеспечивает нормальную связь с другими устройствами.
Инвертор (обратный преобразователь)
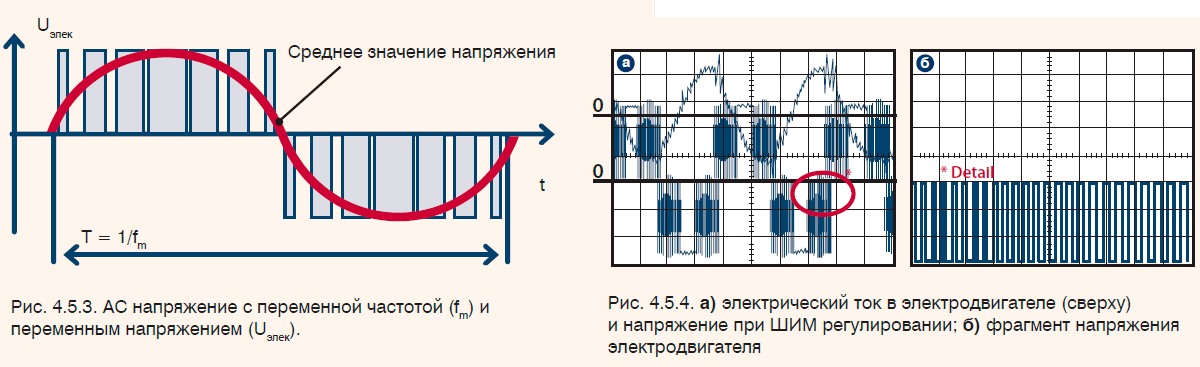
Напряжение на выходе преобразователя частоты не является синусоидальным, как напряжение сети переменного тока. Напряжение, подаваемое на электродвигатель, содержит определенное количество прямоугольных импульсов, см. рис. 4.5.3. Среднее значение таких импульсов образует синусоидальное напряжение необходимой частоты и амплитуды. Частота может изменяться от единиц кГц до 20 кГц, в зависимости от марки. Чтобы избежать шума, производимого в обмотке электродвигателя, предпочтительнее применять преобразователь частоты с фильтром частот выше диапазона звуковой чувствительности (~ 16 кГц).
Принцип работы инвертора называется ШИМ (широтно-импульсная модуляция), и этот принцип в настоящее время широко используется в преобразователях частоты.
Ток в электродвигателе в основном синусоидальный. На рис. 4.5.4 (а) в верхней части показан ток электродвигателя и его напряжение (внизу); на рис. 4.5.4 (б) представлен фрагмент напряжения электродвигателя, из которого видно, как меняется отношение пульсаций напряжения.
Специальные условия, касающиеся преобразователей частоты
После установки преобразователя частоты или оснащенного им насоса, монтажник и эксплуатационщик должны обращать внимание на некоторые моменты, т. к. преобразователь частоты будет вести себя несколько иначе по отношению к сети переменного тока, чем насос со стандартным асинхронным электродвигателем. Далее мы рассмотрим эти моменты.
Несинусоидальная подводимая мощность; преобразователь частоты с трехфазным источником питания
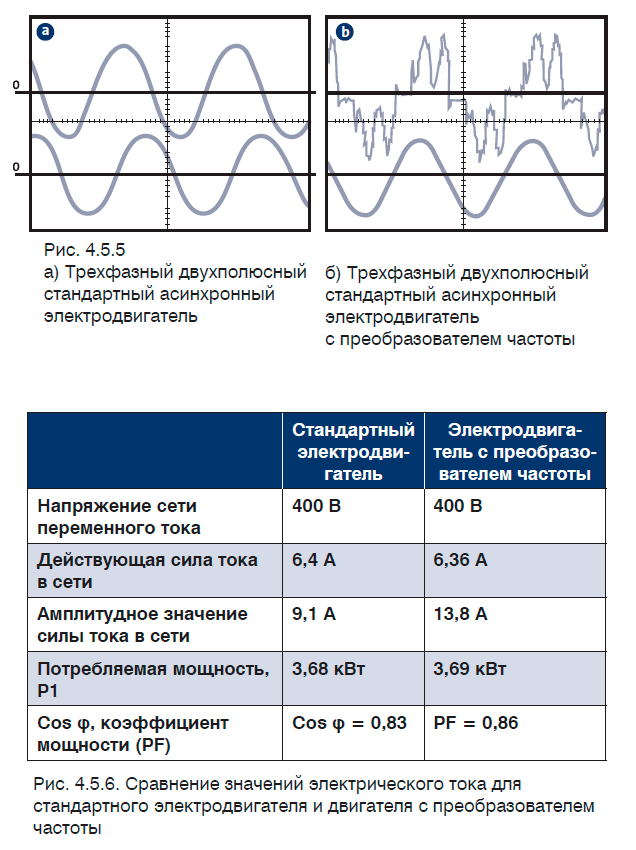
Преобразователь частоты, подобный описанному выше, не получает синусоидальный ток от сети. Помимо всего прочего, это сказывается на размерах кабеля сети, переключателе и т. д. На рис. 4.5.5 показано, как выглядит сила тока и напряжение сети для:
- а) трехфазного стандартного асинхронного электродвигателя, 2900 1/мин
- б) трехфазного стандартного асинхронного электродвигателя со встроенным преобразователем частоты, 2900 1/мин.
В обоих случаях мощность, передаваемая электродвигателем на вал, составляет 3 кВт.
При сравнении силы тока в обоих случаях, можно увидеть два следующих различия, см. рис. 4.5.6:
- Электрический ток в системе с преобразователем частоты — не синусоидальный
- Амплитуда силы тока для электродвигателя с преобразователем частоты намного выше (примерно на 52%)
Это происходит благодаря конструкции преобразователя частоты, в котором сеть питания соединяется с выпрямителем и конденсатором. Изменение в конденсаторе происходит в течение короткого промежутка времени, в этот момент выпрямленное напряжение выше, чем напряжение в конденсаторе.
Для стандартного электродвигателя без преобразователя частоты связь между напряжением (U), силой тока (I), и мощностью (Р) представлена формулой справа. Эту формулу нельзя использовать при расчете потребляемой мощности для электродвигателей с преобразователем частоты.

Так как ток в преобразователе частоты не является синусоидальным, расчет потребляемой мощности, основанный на простом измерении силы тока и напряжения, будет неверным. В данном случае мощность должна рассчитываться с помощью специальных приборов и на основе мгновенных замеров силы тока и напряжения.
Если известна мощность (Р) и действующее значение силы тока и напряжения, так называемый коэффициент мощности (PF) может быть рассчитан по следующей формуле:
Когда сила тока и напряжение являются синусоидальными, коэффициент мощности (PF) не имеет прямой связи со сдвигом фаз между током и напряжением во времени.
При измерении входного тока преобразователя частоты при проведении монтажа или ремонтных работ, необходимо использовать специальный прибор для измерения не синусоидального тока. В общем, прибор для измерения тока преобразователя частоты должен измерять среднее квадратичное значение «True RMS».
Преобразователь частоты и устройство защитного отключения тока или УЗО (ELCB)
Автоматы защитного отключения тока короткого замыкания на землю все чаще используются, как дополнительная защита в электрических установках. Если преобразователь частоты соединен с таким устройством, необходимо удостовериться, что установленный автомат (ELCB) разомкнет цепь, даже если повреждение произойдет на стороне прямого тока преобразователя частоты. Для полной уверенности, что автомат защитного отключения, связанный с преобразователем частоты, всегда сработает в случае замыкания тока на землю, он должен иметь маркировку, представленную на рис. 4.5.7 и 4.5.8.
Оба типа таких автоматов защитного отключения сегодня широко представлены на рынке и доступны.

Литература
Промышленное насосное оборудование – GRUNDFOS
www.grundfos.com
Рекомендуемый контент MirMarine