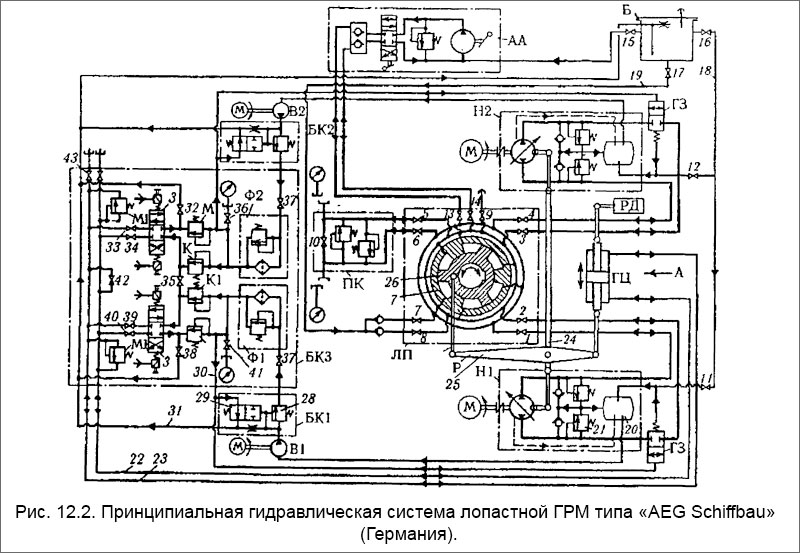
В состав рулевой машины (рис. 12.2) входят следующие основные узлы и элементы: рулевой трехлопастный привод ЛП; два главных насоса Н1 и Н2 регулируемой подачи аксиально-поршневого типа, приводимые в действие электродвигателями; рычажный механизм управления главными насосами (Р, 24, 25); гидроусилитель, состоящий из золотников 3 и гидроцилиндра ГЦ; блок предохранительных клапанов лопастного привода ПК; два гидрозамка ГЗ главных насосов; вспомогательные насосы В1 и В2 постоянной подачи, приводимые в действие электродвигателями; блок клапанов БКЗ электрогидравлической системы управления; аварийный агрегат АА с ручным насосом; бак Б и система гидравлических коммуникаций с необходимыми клапанами.
Рулевая машина работает в следящем режиме, например, с главным насосом Н1 и вспомогательным В1, следующим образом. Электрический управляющий сигнал, возникающий при повороте штурвала на мостике, поступает на одну из двух электромагнитных катушек золотника 3. Он перемещается из среднего в одно из крайних положений (например, вправо, если смотреть по направлению электрического сигнала), открывая доступ рабочей жидкости от вспомогательного насоса В1 через клапаны БК1,37, фильтр Ф1, редукционный клапан минимального давления К1, запорный клапан 39 в магистраль 23 питания исполнительного гидроцилиндра ГЦ, поршень которого начнет перемещаться влево (если смотреть по стрелке А), приводя в действие рычажный механизм управления главными насосами. Масло выходит из левой полости гидроцилиндра ГЦ по магистрали 22 через клапан 40, золотник 3, клапан 38 в бак Б.
Перемещение поршня гидроцилиндра воспринимается датчиком обратной связи РД, преобразуется им в пропорциональный по значению электрический сигнал противоположного управляющему сигналу знака и передается на суммирующее устройство электрической системы управления. Поршень останавливается в тот момент, когда суммарный сигнал (управляющий + обратная связь) станет равным нулю, катушка золотника 3 обесточится и золотник под действием пружины вернется в среднее положение, прекращая подачу масла от вспомогательного В1 насоса в магистраль гидроцилиндра ГЦ. Поршень останавливается и его перемещение будет пропорционально электрическому управляющему сигналу.
При повороте штурвала на некоторый угол в противоположном направлении управляющий сигнал поступает на вторую катушку этого же золотника 3. Он перемещается в другое крайнее положение (влево). При этом масло от насоса В1 подается через клапан 40 в другую магистраль (см. направление стрелок на золотнике 3) гидроцилиндра ГЦ, поршень которого перемещается вправо, а масло из правой полости цилиндра выходит через клапан 39, золотник 3 и клапан 38 в бак Б. Работа датчика обратной связи РД осуществляется аналогичным образом, и в результате перемещение поршня вправо будет также пропорционально управляющему электрическому сигналу.
Перемещение поршня (например, влево) передается через дифференциальный рычаг Р на управляющую штангу 24, которая отклоняет блоки цилиндров аксиально-поршневых насосов Н1 и Н2 на некоторый угол от нейтрального (среднего) положения. Рабочая жидкость движется под давлением по замкнутому силовому контуру (насос Н1 - рулевой лопастный привод) и, преодолевая внешнее сопротивление руля, поворачивает ротор 26, расположенный в цилиндре 27, по часовой стрелке. При этом механическая обратная связь 25 через дифференциальный рычаг Р возвращает штангу 24 в нулевое (среднее) положение, уменьшая подачу насоса Н1. Ротор привода останавливается в тот момент, когда суммарный сигнал на штанге 24 от поршня гидроцилиндра ГЦ и обратной связи 25 будет равен нулю, т. е. блок цилиндров насоса Н1 займет при этом нейтральное (среднее) положение.
При перемещении поршня в другом направлении (вправо) следящий механизм управления насосами работает аналогичным образом, а ротор привода вращается против часовой стрелки.
В рассмотренном случае работают две самостоятельные последовательно включенные следящие системы управления. Поршень гидроцилиндра, являясь исполнительным (выходным) звеном электрогидравлической следящей системы управления, в то же время играет роль задающего (входного) звена рычажного следящего механизма управления подачей главных насосов. Процессы в обеих следящих системах протекают практически одновременно.
В режиме автоматического управления рулевая машина действует по тому же следящему принципу - вместо рулевого работает авторулевой. На лопастных рулевых машинах допускается применение авторулевых тех же марок и систем, что и на плунжерных рулевых машинах.
Двухступенчатые следящие системы управления широко распространены в современных ГРМ. Иногда применяют трехступенчатые, однако увеличение числа ступеней ведет к усложнению систем управления и их обслуживания, к накоплению ошибок и снижению точности управления судном. Многоступенчатость систем управления вызывается необходимостью значительного усиления управляющего сигнала для перемещения регулируемого органа насосов.
Рассмотрим действие основных элементов и узлов ГРМ при различных эксплуатационных ситуациях и режимах работы. При отсутствии управляющего сигнала на золотнике 3 потоки рабочей жидкости от вспомогательных насосов В1 и В2 (при раздельной или совместной их работе) проходят через клапаны соответственно БК1 и БК2, фильтры Ф1, Ф2, клапаны М максимального давления, запорные клапаны 32 и 38 в бак Б. Насосы В1 и В2 берут жидкость из емкостей 20, находящихся в корпусах главных насосов Н1 и Н2. Емкости пополняются из бака Б по магистрали 18. Регулированием клапанов М устанавливают наибольшее необходимое давление в системе управления гидроцилиндром ГЦ, например 1,5-2 МПа.
Гидрозамок ГЗ отключает неработающий главный насос от силовой магистрали, в противном случае он работал бы в режиме гидродвигателя под действием второго насоса, что приводило бы к сползанию руля и погрешностям в его управлении, падению давления в гидросистеме и отказу ГРМ.
Гидрозамки ГЗ управляются клапанами БК1 и БК2 следующим образом. Перед выходом в море одновременно с главным насосом включается в работу его вспомогательный насос (например, Н1 и В1), поток масла от которого при давлении, установленном редукционным клапаном 28, перебрасывает золотник 29 в левое крайнее положение, перекрывая слив масла из магистрали 30 в трубопровод 31 и направляя его в корпус гидрозамка ГЗ. Под давлением масла сжимается пружина, открывается клапан гидрозамка и насос Н1 сообщается с силовой магистралью лопастного привода. При выключении насосов Н1 и В1 золотник 29 перебрасывается пружиной в правое крайнее положение и клапан гидрозамка ГЗ под действием своей пружины, выталкивая жидкость через золотник 29 на слив, закрывается.
Для надежной работы гидрозамков в гидросистеме установлены редукционные клапаны минимального давления К1 и К, создающие подпор рабочей жидкости (0,3-0,5 МПа), что необходимо в случае резкого падения давления (нагрузки) ниже 0,3 МПа в магистрали гидроцилиндра ГЦ.
Существуют различные конструкции гидрозамков и способы управления ими. В частности, в аналогичных ГРМ есть вариант электрического управления гидрозамками, а также механический способ торможения насосов с помощью храпового колеса.
Для повышения надежности лопастной ГРМ в гидравлической системе предусмотрены: возможность переключения управляющих золотников 3 (с помощью клапана 35) и фильтров Ф1, Ф2; взаимозаменяемость главных и вспомогательных насосов, электродвигателей и клапанов; возможность местного управления ГРМ кнопками на золотниках 3 при выходе из строя электрической дистанционной системы управления или штурвалом на рычажном механизме при выходе из строя обоих вспомогательных насосов; возможность работы аварийным насосом АА при выходе из строя обоих главных насосов, а также защита от перегрузок всех основных узлов ГРМ.
При резком повышении давления в лопастном приводе (сильные удары волн о перо руля, навал льдин и т. д.) срабатывает сдвоенный предохранительно-перепускной клапан ПК и руль сползает, погашая внешнюю нагрузку. При этом обратная связь 25 включает в работу главный насос и руль возвращается в заданное положение. Главные насосы защищены предохранительными клапанами 21, которые регулируют на давление, несколько большее, чем клапаны ПК.
Резкое сползание руля, заклинивание главных насосов и рычажного механизма могут вызвать скачок давления в цилиндре ГЦ. В таких случаях срабатывают клапаны Ml. Вспомогательные насосы, фильтры и золотники защищаются клапанами М.
Возможны различные режимы работы ГРМ: с одним из двух или одновременно с обоими главными (или вспомогательными) насосами и с аварийным насосным агрегатом АА. Для проведения ремонтных работ и профилактических осмотров также предусмотрены различные варианты переключения в гидравлической системе. Основные возможные режимы и соответствующие положения запорных клапанов указываются в инструкции.
Например, клапаны 1-8, принадлежащие силовому контуру, должны быть всегда открыты при работе ГРМ. Клапан 9 служит для выпуска воздуха из силового контура при подготовке ГРМ к действию. Клапан 10 является байпасным. Он сообщает магистрали силового контура и используется при ремонтах и профилактических работах. Аналогичное назначение имеет клапан 42 контура управления ГЦ. Клапаны 32-34 используются аналогично клапанам 38-40 при работе вспомогательного насоса В2. Подпитка силового контура осуществляется с помощью магистрали 19 с клапанами 7, 8, 17. При заполнении гидросистемы рабочей жидкостью используются клапаны 11, 12, 16. Работа ГРМ в аварийном режиме обеспечивается агрегатом А А с клапанами 13-15. Для подсоединения манометров служат клапаны 36, 41,43.
В гидросистемах лопастных ГРМ применяют качественные минеральные масла, примерно соответствующие турбинному 46, моторному Т и веретенному АУ.