Автоматическое регулирование судовых энергетических установок и автоматическое управление ими позволяют повысить производительность и облегчить условия труда обслуживающего персонала, а также увеличить степень надежности установок и их экономичность.
Автоматическое регулирование обеспечивает поддержание заданного значения контролируемого параметра независимо от изменения условий работы регулируемого объекта (температура и давление охлаждающей воды и масла дизеля, частота вращения дизель-генератора, давление пара вспомогательного котла и т. п.).
Система автоматического регулирования (САР) включает регулятор и регулируемый объект (рис. 135).
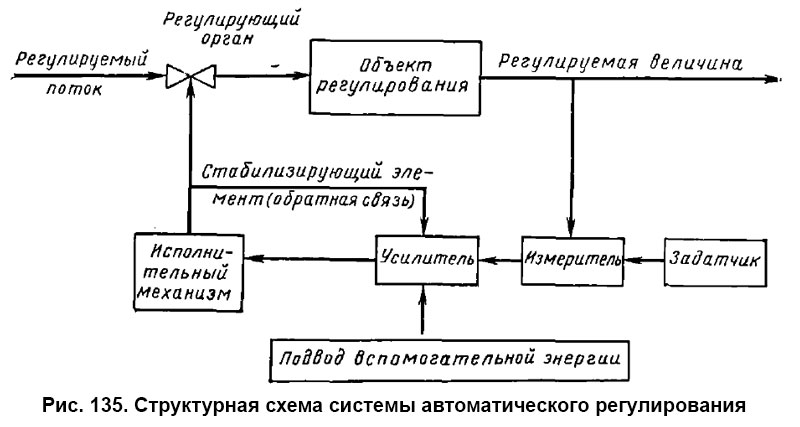
Регулируемый объект (объект регулирования) — агрегат, механизм или устройство, в которых протекают процессы, приводящие к изменению регулируемой величины под воздействием внешней нагрузки или перемещения регулирующих органов. Регулируемыми объектами являются дизель, котел, теплообменный аппарат и т. п.
Регулируемая величина — физический показатель, параметр, характеризующий состояние процесса, происходящего в регулируемом объекте. К регулируемым величинам относятся: частота вращения дизеля, температура воды, масла, топлива, давление масла, уровень и вязкость топлива и т. п.
Регулируемый поток — среда, энергия, подводимая к объекту (или отводимая от него), изменением количества которой поддерживается заданное значение регулируемой величины. Например, поддержание требуемой частоты вращения дизель-генератора при изменении нагрузки достигается изменением количества подаваемого в цилиндры дизеля топлива.
Чувствительный элемент (измеритель) измеряет текущее значение регулируемой величины, сравнивает его с заданным и в случае отклонения от заданного значения выдает выходной сигнал, пропорциональный величине отклонения.
Регулирующий орган осуществляет изменение количества регулируемого потока с целью восстановления заданного значения регулируемой величины. Положение регулирующего органа может изменяться за счет энергии, развиваемой измерителем, или за счет энергии от постороннего источника, называемой вспомогательной энергией.
Усилительный элемент (усилитель) служит для управления подводом вспомогательной энергии к исполнительному механизму пропорционально величине и знаку выходного сигнала чувствительного элемента.
Исполнительный механизм управляет положением регулирующего органа по сигналу от усилителя. В качестве исполнительных механизмов применяются различные сервомоторы, в которых потенциальная энергия (давление) рабочей среды преобразуется в механическую энергию.
Задающее устройство (задатчик) устанавливает значение регулируемой величины, которое регулятор должен поддерживать.
Стабилизирующий элемент обеспечивает дополнительную связь между элементами регулятора и служит для повышения его устойчивости.
Совокупность всех элементов САР, за исключением регулируемого объекта, называется регулятором.
В автоматических регуляторах применяются различные принципы регулирования.
Принцип регулирования по отклонению регулируемой величины (принцип Ползунова—Уатта). На рис. 136, а изображен регулятор частоты вращения дизеля. Центробежный маятник (измеритель) с грузами 4 связан с валом 6 двигателя. При изменении, например увеличении, частоты вращения вала грузы 4 расходятся и через скользящую муфту 3 и рычаг (исполнительный механизм) 2 перемещают тягу (регулирующий орган) 1 топливных насосов в сторону уменьшения подачи топлива.Требуемая частота вращения вала двигателя (регулируемый объект) задается жесткостью пружины (задатчиком) 5.
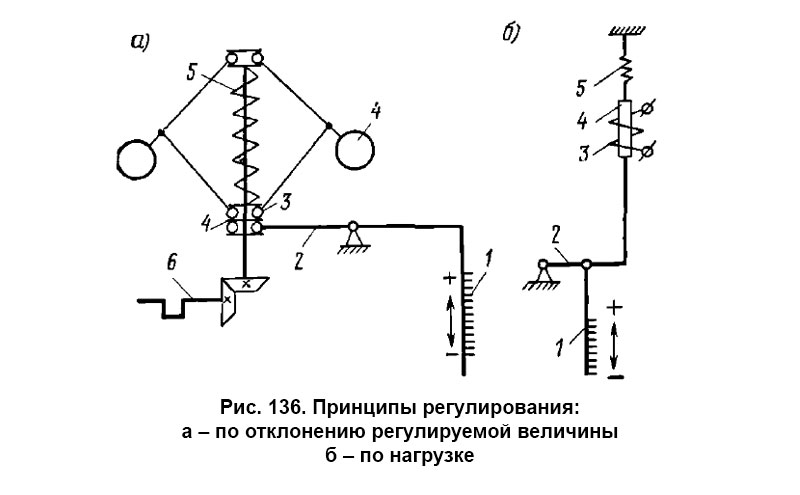
Таким образом, регулятор начинает изменять количество подаваемого топлива тогда, когда частота вращения вала (регулируемая величина) отклонится от заданного значения. Перестановочные усилия регулятора пропорциональны отклонению регулируемой величины.
Принцип регулирования по нагрузке (принцип Понселе). Рассмотрим его на примере регулирования частоты вращения дизель-генератора (рис. 136, б). На обмотку электромагнита 3 подается напряжение от генератора. Образующееся магнитное поле, пропорциональное напряжению и, следовательно, частоте вращения дизель-генератора, втягивает железный сердечник 4, который связан через рычаг 2 с рейкой 1 топливных насосов. Перемещению сердечника противодействует задающая пружина 5, работающая на растяжение. В случае увеличения нагрузки частота вращения дизель-генератора будет уменьшаться. Это приведет к понижению напряжения и, следовательно, к ослаблению магнитного поля катушки 3. Пружина 5 поднимет сердечник 4, который, в свою очередь, переместит топливную рейку 1 в направлении увеличения подачи топлива.
Здесь изменение подачи топлива происходит в зависимости от нагрузки, но сама регулируемая величина (частота вращения) не контролируется и на ее изменение регулятор не реагирует. Это может привести к значительным отклонениям частоты вращения дизель-генератора и вырабатываемого им напряжения. Поэтому принцип регулирования по нагрузке на практике самостоятельно не применяется. Этот принцип обычно используется в сочетании с принципом Ползунова— Уатта, что обеспечивает быстродействие регулятора и высокую точность поддержания регулируемой величины при всех нагрузках. Такие регуляторы называются двухимпульсными.
Принцип регулирования по скорости изменения регулируемой величины (принцип Сименсов). В регуляторе, построенном по такому принципу, регулируемый орган перемещается пропорционально скорости изменения регулируемой величины. Однако само значение регулируемой величины не контролируется, в связи с чем этот принцип самостоятельно не применяется. Он используется вместе с принципом Ползунова—Уатта, что позволяет улучшать качество переходного режима.