Энкодер – это устройство, преобразующее линейное или угловое перемещение в последовательность сигналов, позволяющих определить величину перемещения. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего.
Выделяют линейные и поворотные энкодеры.
Поворотный энкодер – устройство, преобразующее угол поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить этот угол.
Энкодеры бывают двух типов:
- инкрементный (накапливающий) – энкодер выдаёт импульсы, означающие изменение его положения (пример: энкодер используемый на колёсике компьютерной мышки);
- абсолютный – энкодер возвращает своё абсолютное положение (пример: переменный резистор в сервоприводе).
Инкрементные энкодеры на выходе формируют импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Сразу же после включения накапливающего энкодера положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта инкрементные датчики имеют нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам такого типа датчиков угла положения также относится то, что невозможно определить пропуск импульсов от энкодера по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала, до тех пор, пока не будет пройдена нуль-метка. Для определения направления вращения применяются два измерительных канала («синусный» и «косинусный»), в которых идентичные последовательности импульсов (меандр) сдвинуты на 90° относительно друг друга.
Абсолютные энкодеры выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота вала датчика угла. Датчики угла этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
Энкодеры различаются по принципу действия:
- оптические;
- магнитные (на датчиках Холла);
- со щеточными контактами;
- резисторные (потенциометры);
- индуктивные;
- ёмкостные.
По допустимому углу поворота вала подразделяются на:
- с ограниченным диапазоном работы;
- с неограниченным диапазоном работы.
Наибольшее применение получили оптические и магнитные энкодеры.
Оптические энкодеры
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота. Оптические энкодеры работают по двум принципам: на просвет и на отражение.
Инкрементный энкодер
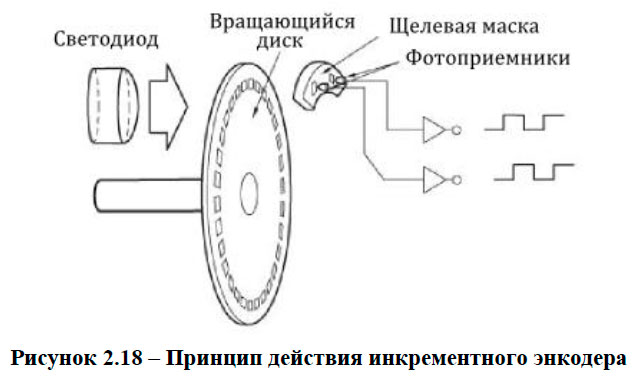
Оптические поворотные инкрементные энкодеры стали наиболее популярным устройством для измерения угловой скорости и положения в двигателях, на валу колеса или рулевого механизма. Простейшим типом инкрементного энкодера является одноканальный тахометр, обычно состоящий из механического прерывателя света, производящего определенное количество прямоугольных или синусоидальных импульсов, при каждом обороте вала (рисунок 2.18). Увеличение числа импульсов увеличивает разрешение и стоимость модуля. Разрешение энкодера измеряется в числе отсчетов на оборот (CPR). Минимальное угловое разрешение легко вычислить по величине CPR. Типичный энкодер имеет значение 2000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10000. С точки зрения требуемого диапазона, конечно важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения.
Эти относительно недорогие устройства используются в качестве датчиков скорости в цепи обратной связи в системах управления, работающих на средних и высоких скоростях, но на очень малых скоростях чувствительны к шумам и проблемам со стабилизацией из-за ошибок квантования. Здесь нужно искать компромисс между разрешением и скоростью обновления: улучшенная переходная характеристика требует большей скорости обновления, которая для данного числа линий уменьшает число возможных импульсов энкодера для интервала дискретизации.
Можно разделить энкодеры по типу считываемой информации:
1. Одиночный энкодер (рисунок 2.19 а) – считает количество импульсов и по количеству определяет угол поворота.

Преимущества:
- самый простой и доступный вариант энкодера (только один датчик – излучатель+приёмник).
Недостатки:
- ошибки инициализации (при старте системы, не ясно в каком положении находится энкодер);
- ошибки при подсчете импульсов на границах (возможны ложные срабатывания из-за «дребезга»;
- нестабильность работы на низких скоростях;
- невозможность определить направление движения.
2. Сдвоенный (квадратурный) энкодер (рисунок 2.19 б) считает количество импульсов, учитывая направление. Квадратурные энкодеры учитывают направление вращения путем добавления второго канала, смещенного относительно первого, поэтому результирующие последовательности импульсов сдвинуты по фазе на 90°, как показано на рисунке 2.20.
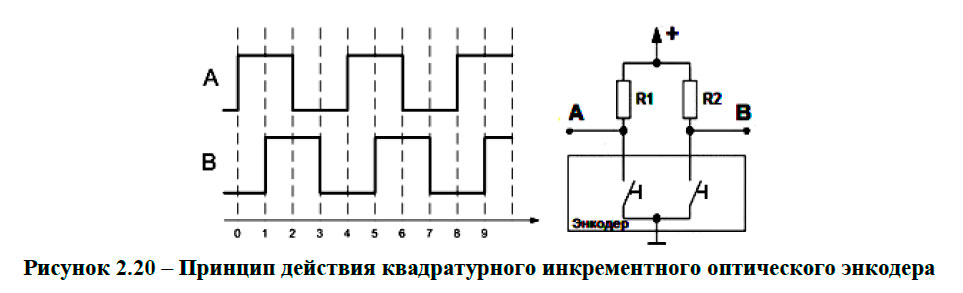
Разновидность инкрементального энкодера, которая состоит из двух датчиков, срабатывающих со смещением в полшага, позволяет практически полностью гарантировать отсутствие ложных срабатываний на границе одного из энкодеров.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- 1. Две единицы.
- 2. Ноль и единица.
- 3. Ноль и ноль.
- 4. Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
Следствием инкрементного характера квадратурных выходных сигналов является то, что любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки. Создание такой точки отсчета может быть произведено несколькими способами. Для приложений, включающих непрерывное вращение на 360 градусов, большинство энкодеров включает в качестве третьего канала специальный индексный выход, который переходит в высокое состояние на каждом полном обороте вала. Промежуточные положения вала затем определяются числом, на которое увеличился, или уменьшился счетчик импульсов от этого известного индексированного положения. Одним из недостатков такого подхода является потеря информации об относительном положении в случае сбоя питания.
В случае ограниченного вращения, такого как возвратно-поступательное движение, вдоль направляющих (как в станках с ЧПУ) можно использовать электрические концевые выключатели и/или механические ограничители для задания исходного положения. Для улучшения повторяемости, возврат в исходное положение разбивается на два этапа. Ось вращается с пониженной скоростью в соответствующем направлении до тех пор, пока не встретится механизм остановки, после чего происходит обратное вращение в течение предопределенного короткого промежутка времени. Вал вращается медленно обратно до остановки на заданной медленной скорости. Из этой заданной начальной точки, тем самым, устраняя любые изменения в инерциальной нагрузке, которые могли бы повлиять на окончательное исходное положение. Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
С другой стороны, функция абсолютного индексирования может быть основана на каком-то внешнем действии по созданию опорной точки, которое отделено от цикла непосредственного сервоуправления. Хорошей иллюстрацией этой ситуации служит инкрементный датчик, используемый для отслеживания угла поворота баллера руля.
Преимущества:
- относительная простота реализации (два датчика);
- отсутствие ошибок при подсчете импульсов;
- возможно определить направление вращения.
Недостатки:
- ошибка инициализации (при старте системы, не ясно, в каком положении находится ротор);
- нестабильность работы на низких скоростях.
Абсолютные энкодеры
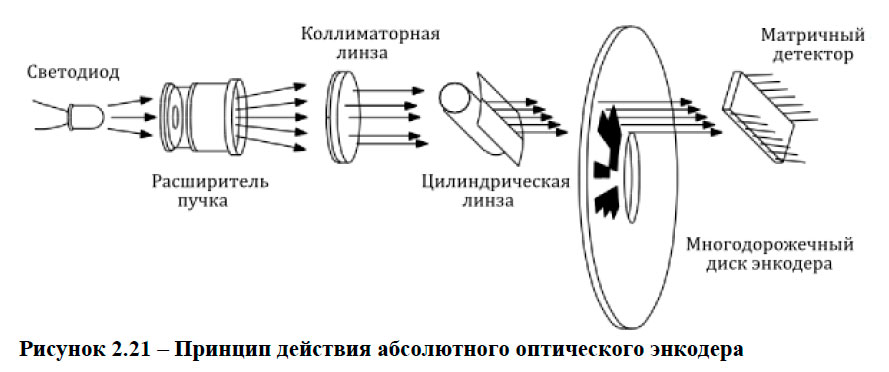
Абсолютные энкодеры обычно используются в приложениях с медленным вращением, в которых недопустима потенциальная потеря информации о положении. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Принцип действия абсолютного оптического энкодера представлен на рисунке 2.21. Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера со щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.
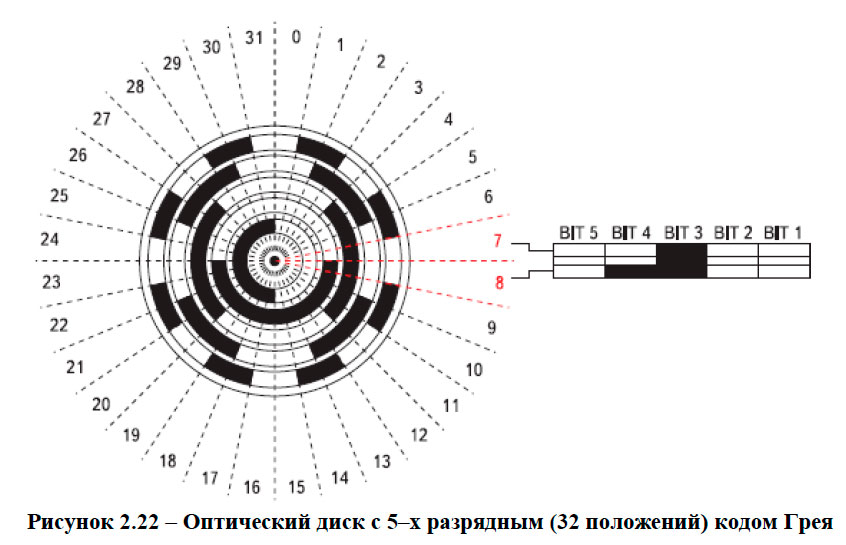
Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея является то, что только один бит, изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Пример оптического диска с кодом Грея представлен на рисунке 2.22. Таблица кода Грея в сравнении с двоичным кодом представлен в таблице 2.3.

Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота баллера руля, в отличие от измерения высокоскоростного непрерывного вращения, которое потребует вычисления смещения вдоль всего пути движения.
Преимущества:
- отсутствие ошибок инициализации (при старте системы, ясно в каком положении находимся);
- отсутствие ошибок при подсчете импульсов на границах;
- возможно, определить направление вращения;
- отсутствие проблемы с граничными положениями (одновременно меняется не более 1 бита).
Недостатки:
- относительная сложность реализации (несколько датчиков);
- ограничения в разрешающей способности (для большей точности требуется больше каналов);
- параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-ти битный абсолютный энкодер, использующий дополнительные выходные
- сигналы для помехоустойчивости потребует 28-ми жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером;
- чувствителен к ударам и вибрациям.
Магнитный энкодер
Магнитный энкодер, в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60 тыс. об/мин.
На рисунке 2.23 а представленный магнитный энкодер высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов. При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. При постоянном вращении возникает синусоидальное напряжение. Электронная схема усиливает и преобразует этот сигнал в удобную для обработки форму. На базе датчиков Холла строят инкрементальные абсолютные ШИМ–энкодеры.
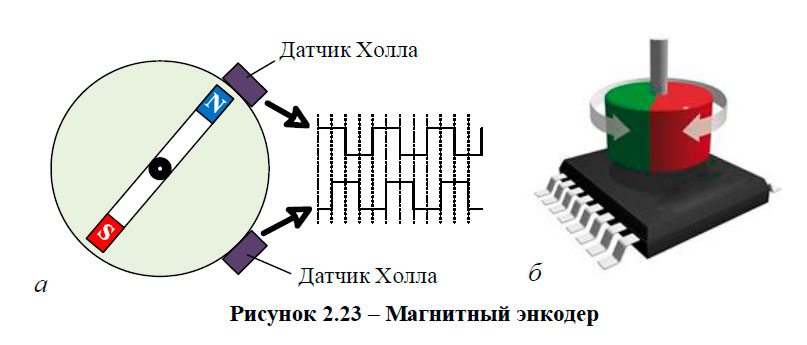
Еще более просто может работать другой тип магнитного декодера, представленного на рисунке 2.23 б. Система измерения угла состоит из микросхемы и небольшого магнита, размещенного на небольшом расстоянии над микросхемой.
Датчики Холла, размещенные на кристалле микросхемы, фиксируют напряженность магнитного поля магнита, где затем рассчитывается абсолютное значение угла поворота магнита. Функциональные возможности, встроенные в микросхему, позволяют запрограммировать «нулевое» положение магнита, относительно которого будет рассчитан угол, произвести диагностику и откалибровать положение магнита над микросхемой для лучшей точности. Энкодер малочувствителен к рассогласованию взаимного положения микросхемы и магнита, а также к вариациям величины воздушного зазора.
Механические энкодеры
Механические энкодеры содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала. Основным недостатком механического энкодера является дребезг контактов, который может приводить к неправильному подсчёту и определению направления вращения.
Литература
Элементы и функциональные устройства судовой автоматики - Авдеев Б.А. [2018]