В зависимости от характера воздействия регуляторов на объект регулирования значение регулируемой величины поддерживается по-разному.
Астатические (интегральные) регуляторы обеспечивают постоянное значение регулируемой величины независимо от величины возмущающего воздействия на объект. Однако они не обладают необходимой устойчивостью. Это выражается в том, что хотя среднее значение регулируемой величины поддерживается постоянным, она может колебаться около среднего значения длительное время (рис. 137, б).
Статические регуляторы поддерживают регулируемую величину с некоторым отклонением (статической ошибкой), зависящим от величины возмущающего воздействия. При максимальном значении возмущающего воздействия статическая ошибка будет наибольшей. Статические регуляторы, у которых регулируемая величина отклоняется пропорционально изменению возмущающего воздействия, называются пропорциональными. Статические регуляторы работают устойчиво, с малым временем переходного режима (рис. 137, а и 138, а).
Изодромные (пропорционально-интегральные) регуляторы состоят из элементов астатического и статического регулирования. Они обладают достаточной устойчивостью при нулевой статической ошибке (рис. 138, б).
Программные регуляторы осуществляют регулирование по заданной программе. Регуляторы имеют дополнительные элементы, автоматически изменяющие установку задатчика в зависимости от нагрузки, времени или других параметров.
Двухпозиционные регуляторы обеспечивают поддержание регулируемой величины в заданном диапазоне (промежутке) значений. Такие регуляторы работают по принципу «включен—выключен», т. е. регулирующий орган переставляется в одно из двух возможных положений «Открыт—Закрыт».
В зависимости от происхождения усилия, перемещающего регулирующий орган, регуляторы подразделяют на регуляторы прямого- действия и регуляторы непрямого действия.
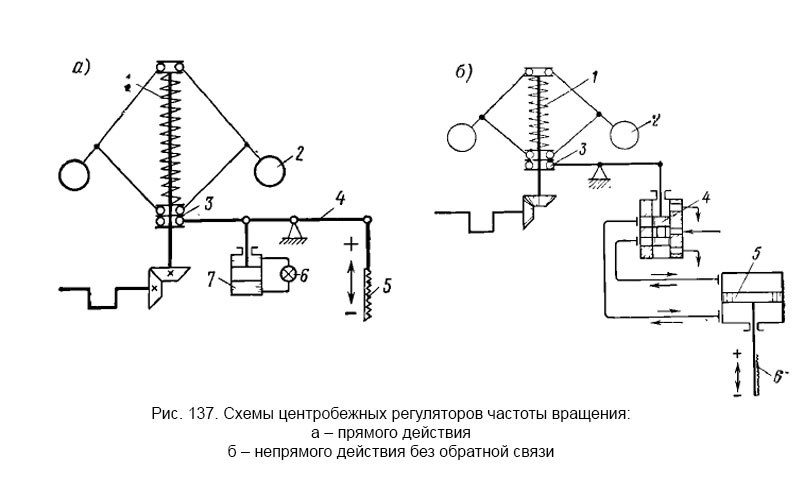
Регулятор прямого действия — такой регулятор, у которого ре-гулирующий орган перемещается за счет энергии, развиваемой измерительным органом. Схема такого регулятора показана на рис. 137, а. От вала двигателя через коническую передачу вращение передается центробежному маятниковому измерителю. При установившемся режиме работы двигателя центробежная сила, развиваемая грузами 2, уравновешивается натяжением пружины 1, а также массами грузов и муфты. Топливная рейка 5, связанная рычагом 4 с шарнирной муфтой 3, будет неподвижна. Количество подаваемого топлива соответствует нагрузке двигателя, и частота вращения вала равна заданному.
При увеличении нагрузки на двигатель частота вращения вала начнет понижаться. Центробежная сила грузов будет уменьшаться, и под воздействием пружины муфта станет перемещаться вниз. При перемещении муфты топливная рейка будет передвигаться в сторону увеличения подачи топлива, восстанавливая частоту вращения двигателя. В результате наступит равновесие при новом установившемся режиме, соответствующем новой нагрузке двигателя. Однако частота вращения вала не станет равной первоначальному значению. При увеличении нагрузки частота вращения вала будет несколько меньше, а при уменьшении нагрузки — несколько больше исходной. Это значит, что рассматриваемый регулятор является статическим. Разность между значениями частоты вращения, поддерживаемой регулятором при максимальной нагрузке и нагрузке холостого хода, равна статической ошибке регулятора.
Для сглаживания резких рывков регулятора при быстром изменении нагрузки двигателя предусмотрен каттаракт, или демпфер. Он состоит из заполненного маслом цилиндра 7, поршень которого связан с рычагом 4. Обе полости цилиндра соединяются между собой через игольчатый клапан 6, которым регулируется скорость протекания масла.
Преимущество регуляторов прямого действия заключается в простоте их конструкции. Однако для получения больших перестановочных усилий, необходимых для перемещения регулирующих органов, массы чувствительных элементов должны быть большими, что не всегда целесообразно. Кроме этого, из-за трения в рычагах и опорах, слабины в соединениях и т. п. регуляторы прямого действия обладают значительной нечувствительностью. Они используются для регулирования температуры и давления охлаждающей воды, топлива и масла, частоты вращения маломощных дизелей, а также в качестве предельных — для ограничения частоты вращения главных и вспомогательных дизелей.
Регулятор непрямого действия — такой регулятор, в котором регулирующий орган перемещается за счет вспомогательной энергии от постороннего источника. В таких регуляторах между чувствительным элементом и регулирующим органом имеется усилительное устройство и исполнительный механизм (сервомотор). Так как измерительный орган регулятора не осуществляет силового воздействия на регулирующий орган, масса его подвижных частей может быть минимальной. Благодаря этому область применения регуляторов непрямого действия практически неограничена.
В качестве вспомогательной энергии обычно используется минеральное масло давлением 6—10 бар или очищенный воздух давлением 2—10 бар.
Регуляторы непрямого действия могут быть без обратных связей и с обратными связями. Обратные связи бывают жесткими и гибкими.
Регулятор непрямого действия без обратной связи для регулирования частоты вращения двигателя изображен на рис. 137, б. Усилителем здесь является отсечной гидравлический золотник 4, а исполнительным механизмом — гидравлический поршневой сервомотор 5 двустороннего действия. Сервомотор связан с регулирующим органом — топливной рейкой 6. В качестве вспомогательной энергии используется масло под давлением, которое подводится к усилительному золотнику 4 и от него к верхней или нижней полостям сервомотора 5. Когда частота вращения двигателя равна заданному значению, окна золотника усилителя, сообщающие его с полостями сервомотора, перекрыты, и поршень сервомотора неподвижен. В этом установившемся режиме количество подаваемого топлива соответствует нагрузке двигателя.
При уменьшении нагрузки на двигатель частота вращения вала будет возрастать. В результате этого грузы 2 центробежного измерителя начнут расходиться, сжимая пружину 1, и через муфту 3 и рычаг будут опускать золотник 4. Через открывающееся нижнее окно усилителя масло начнет поступать в полость над поршнем 5 сервомотора, перемещая его вниз, а топливную рейку 6 — в направлении уменьшения подачи топлива. Одновременно с этим масло из-под поршня сервомотора через открытое верхнее окно усилителя будет выходить на слив. Когда частота вращения снизится до первоначального значения, золотник 4, возвращаясь вверх, закроет окна усилителя, и перемещение поршня сервомотора прекратится. Топливной рейкой будет установлена уменьшенная подача топлива, соответствующая меньшей нагрузке двигателя. В новом равновесном режиме частота вращения двигателя вновь станет равна заданной. Таким образом, этот регулятор относится к астатическим. Его целесообразно применять в тех случаях, когда объект обладает саморегулированием.
Регуляторы непрямого действия без обратной связи используют для регулирования температуры и давления охлаждающей воды, масла, топлива, а также применяют в качестве предельных — для ограничения частоты вращения главных дизелей.
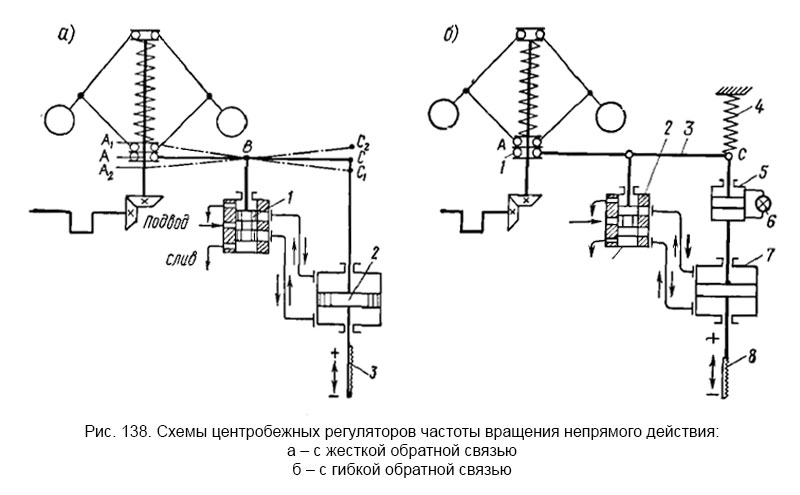
Регулятор непрямого действия с жесткой обратной связью показан на рис. 138, а. В отличие от регулятора, рассмотренного ранее, здесь шток сервомотора 2 при помощи рычага жестко соединен с золотником усилителя 1.
При изменении нагрузки и, следовательно, частоты вращения двигателя центробежный измеритель повернет рычаг АВС вокруг точки С, что приведет к перемещению точки Б и с ней золотника усилителя 1. Масло начнет поступать в соответствующую полость сервомотора 2. Двигаясь, поршень сервомотора будет изменять через рейку 3 количество подаваемого топлива и одновременно перемещать точку С, а вместе с ней и рычаг АВС вокруг точки А в противоположном направлении. В результате точка В возвратится в исходное положение, и золотник прекратит подачу масла к сервомотору. Установится новое- равновесное положение, при котором количество подаваемого топлива будет соответствовать нагрузке двигателя.
При уменьшении нагрузки рычаг АВС займет положение А1ВС1, при увеличении нагрузки — А2ВС2.
Жесткая обратная связь оказывает стабилизирующее воздействие, обеспечивая устойчивую работу регулятора. Однако, как нетрудно заметить, такой регулятор относится к статическим и не может обеспечить точного значения регулируемой величины независимо от нагрузки. Величину статической ошибки можно изменять соотношением плеч рычага АВС.
Регуляторы с жесткой обратной связью не получили широкого распространения на дизелях.
Регулятор непрямого действия с гибкой обратной связью обычно называют изодромным или пропорционально-интегральным.
В отличие от жесткой обратной связи гибкая связь прекращает воздействие на золотник усилителя не сразу, а спустя некоторое время после перемещения регулирующего органа. Благодаря этому после каждого изменения нагрузки регулируемая величина вновь достигает первоначального значения. Устройство, осуществляющее дополнительное перемещение регулирующего органа и тем самым приводящее регулируемую величину к первоначальному значению, называется изодромом.
Схема регулятора изображена на рис. 138, б. Между поршнем сервомотора 7 и рычагом 3 обратной связи находится изодром 5, представляющий собой цилиндр с поршнем. Обе полости цилиндра заполнены маслом и сообщены между собой через игольчатый клапан 6. Цилиндр изодрома жестко связан со штоком сервомотора 7, поршень изодрома — с рычагом 3 обратной связи, конец которого подвешен на пружине 4 изодрома. Эта пружина, работающая как на сжатие, так и на растяжение, при установившемся режиме всегда разгружена.
При уменьшении нагрузки частота вращения вала двигателя возрастает. Муфта 1 центробежного измерителя частоты вращения, перемещаясь вверх и поворачивая рычаг АВС вокруг точки С, поднимет золотник усилителя 2. Масло начнет поступать в верхнюю полость сервомотора 7, и его поршень, опускаясь, будет перемещать топливную рейку 8 в направлении уменьшения подачи топлива. Одновременно с поршнем сервомотора будет перемещаться вниз и цилиндр изодрома 5. В начальный момент, благодаря вязкости масла и малому проходному сечению дроссельного клапана б, поршень и цилиндр изодрома перемещаются как одно целое, поворачивая рычаг АВС вокруг точки А по часовой стрелке и растягивая пружину 4. Золотник усилителя 2 придет в среднее положение, и поршень сервомотора остановится.
Однако так как пружина изодрома в данный момент растянута, то под действием ее силы упругости поршень изодрома начнет перемещаться вверх. При этом рычаг АВС получает дополнительное перемещение вокруг точки А, на этот раз против часовой стрелки. Золотник усилителя поднимается вверх и подает дополнительную порцию масла для опускания поршня сервомотора и дальнейшего уменьшения подачи топлива. Частота вращения двигателя снижается до первоначального значения, муфта регулятора опускается, рычаг АВС возвращается в исходное положение, и золотник прекращает подачу масла к сервомотору. Переходный процесс заканчивается, когда вся система приходит в равновесие на новом установившемся режиме.
Продолжительность переходного процесса зависит от величины открытия дроссельного клапана изодрома. Если закрыть дроссельный клапан, то получится регулятор с жесткой обратной связью; если клапан открыть полностью, то получится регулятор непрямого действия без обратной связи.
Регуляторы с гибкой обратной связью применяют для регулирования любых объектов с быстроизменяющейся нагрузкой, требующих высокой точности поддержания регулируемой величины. Такие регуляторы используют для автоматического регулирования частоты вращения дизель-генераторов, а в последние годы — и главных дизелей, их также можно применять для регулирования вязкости топлива, давления пара во вспомогательных котлах и т. д.